摘要
为了提高城轨列车再生能量利用率, 本文提出一种基于节能的协同控制优化方法, 建立以停车精度和准时性为约束条件、以协同时间最长和协同次数最多为优化目标的控制决策模型. 根据列车速度、位移方程, 求出列车运行工况转换点速度和时刻的解析解; 结合积分变量对停车精度和运行时间的影响, 确定积分变量的取值范围, 将积分变量与列车运行工况转换点关联起来, 设计列车运行工况转换点的优化调节策略, 并计算目标速度曲线; 分析城轨列车牵引工况和制动工况重叠时间的影响因素, 得到列车一次牵引最大速度对协同时间的影响规律, 设计协同控制策略, 求解列车二次牵引时刻及对应一次牵引最大速度. 最后, 以国内某条地铁线路为背景设计算例, 验证了该模型的有效性.
Abstract
To improve the utilization rate of the regenerative energy for urban rail trains, a collaborative control optimization method based on energy conservation is proposed. A control decision model is established, which takes the parking accuracy and punctuality as constraints and takes the longest coordination time and the most coordination times as optimization objectives. According to the running speed and displacement equations of the urban rail train, the analytical solutions of the speed and time at the switching point of the train operation conditions are obtained. Combined with the influence of the integral variable on parking accuracy and running time, the value range of the integral variable is determined. The integral variable is associated with the switching point of the train operation conditions, the optimal regulation strategy of the switching point of the train operation conditions is designed, and the target speed curve is calculated. The influence rule of the maximum speed of train traction on coordination time is obtained by analyzing the influencing factors of the overlapping time of the urban rail train traction and braking conditions. The collaborative control strategy is designed to solve the second traction time of the train and the corresponding maximum speed of the first traction. Finally, the effectiveness of the model was verified by designing an example against the background of a certain subway line in China.
1 引言
城市轨道交通在城市发展中的重要性日益凸显,且因其准时性等优势备受居民的青睐 [1],随之而来的城轨列车能耗问题被运营公司重视起来. 在城轨列车各类能耗中,牵引能耗比重尤为突出,约占总能耗的55%∼65%,而辅助设备以及灯光照明仅各占25%∼ 35%,8%∼12%. 如何通过优化列车运行来降低牵引能耗,受到越来越多学者们的关注 [2] . 因城轨列车站间运行时间较短、制动频率较高,产生的再生能量比较可观,并可供同一供电臂下处于牵引运行工况的列车即时利用以减少牵引能耗 [3] . 因此,高效、充分地利用再生能量是降低城轨列车牵引能耗的重要途径.
目前国内外许多学者从列车时刻表优化、列车协同控制优化和调度控制一体化3个方面研究了如何提高再生能量利用率. 列车时刻表优化主要从列车到发时刻、发车间隔、站间运行冗余时间分配等方面入手,增加再生能量的即时利用 [4-6],Yang等 [7] 通过优化列车到发时间和调整发车间隔,降低牵引能耗; Mo等 [8] 采用优化综合时刻表,达到最大化牵引制动重叠时间; 张京辉等 [9] 通过调整发车间隔来优化列车能效. 文献 [4-9] 虽然提高了再生能量利用率,但是改变了列车的到发时刻和发车间隔. 部分学者通过列车协同控制方法的研究,优化调节多列车运行曲线,提高再生能量利用率 [10-12],荀径等 [13] 将牵引供电模型引入到城轨列车运行优化控制算法中,建立了节能驾驶综合模型,通过对牵引网压的检测,改变列车运行速度,实现对城轨列车的节能优化控制; Sun等 [14] 提出再生能量分配方案,并通过对相邻列车运行速度的调整,吸收利用再生能量; 柏赟等 [15] 提出基于滚动优化的列车协同控制方法,实时计算下一站间运行实际能耗最小的操纵方案. 文献 [10-15] 虽然通过协同控制方法提高列车再生能量利用率,但对列车运行时间和到发时刻或多或少都产生了影响. 还有一些学者提出调度控制一体化的节能优化方法 [16-18],Liu等 [19] 在优化配置储能设备基础上,建立了非线性整数规划模型,并设计了一种求解最优列车时刻表的有效算法; Su等 [20] 提出了一种集列车时刻表优化和驾驶策略为一体的综合控制方法,分别从驾驶策略层和时刻表优化层两级来解决再生能量利用问题; 步兵等 [21] 设计了调度控制一体化优化方法,通过对列车的协同控制、停站时间的调整以及列车发车间隔的优化,使得求解的列车牵引实际能耗全局最优. 文献 [16-21] 综合了时刻表优化和协同控制方法,从两个方面考虑再生能量利用率问题,同样改变了列车的运行时间和到发时刻,给乘客出行造成不必要的等待时间,降低了服务运营质量.
文献表明,大部分学者从调整列车时刻表或控制列车站间运行时间,亦或增加再生能量存储设备的角度出发,提高城轨列车再生能量利用率,降低牵引能耗,本文将列车在各站点准时性作为约束条件进行节能研究. 在列车节能运行协同控制过程中如何确保时刻表不变,是该领域亟需解决的技术难点. 因此,本文针对该难点,以不增加额外储能设备为前提,通过调整一次牵引最大速度和二次牵引时间来增加不同列车牵引工况和制动工况的重叠时间和重叠次数,在保证列车准时性的同时达到了节约能耗的目的.
2 目标速度曲线计算
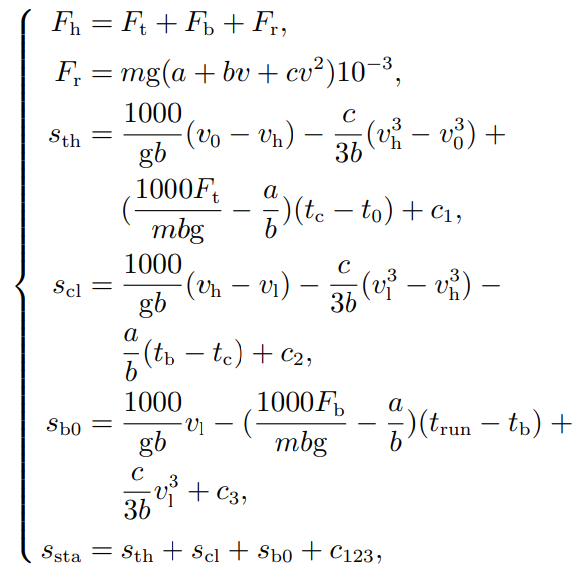
按照线路参数(包括站间距、运行时间等)计算城轨列车目标速度曲线,以准时性、停车精度为约束条件,不考虑附加阻力的情况下,城轨列车工况转换点计算方程如式(1)所示:
(1)
其中: Fh,Ft,Fb,Fr分别代表列车所受合力、牵引力、制动力和阻力(单位: N),m代表质量(单位: kg),g代表重力加速度,a,b,c代表实验确定的列车基本运行阻力经验参数,v0,vt分别代表列车起动时初速度(单位: km/h)和初时刻(单位: s),tc,tb分别代表列车惰行时初时刻和制动时初时刻(单位: s),trun代表列车计划站间运行时间(单位: s),vh代表牵引工况最大速度(单位: km/h),sth代表列车在相应的牵引工况所行驶的距离(单位: m),vl代表惰行结束时的速度(单位: km/h),scl代表列车在相应的惰行工况所行驶的距离(单位: m),sb0代表列车在相应的制动工况所行驶的距离(单位: m),ssta,c123分别代表站间距(单位: m)和站间距计算过程积分变量, c1,c2,c3分别代表牵引工况行驶距离计算过程、惰行工况行驶距离计算过程和制动工况行驶距离计算过程积分变量.
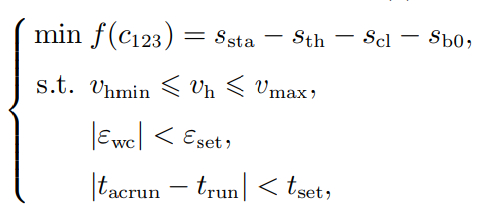
在计算过程中,因积分变量c123直接影响列车工况转换点(vh,tc),(vl,tb)的值,从而影响列车的停车精度和准时性,因此,有必要引入关于c123的优化调节策略来达到预设的停车精度和准时性,如式(2)所示:
(2)
其中: vmax,εwc,εset,vhmin,tacrun,tset分别代表列车最大限速(单位: km/h)、停车误差(单位: m)、最大允许停车误差(单位: m)、一次牵引最低限速(单位: km/h)、实际运行时间(单位: s)、最大允许运行时间误差(单位: s).
目标速度曲线计算的关键是求列车工况转换点的值,且直接关系到列车运行能耗和协同控制条件的判断,是列车能耗计算和模型求解的基础.
3 节能运行模型
通过列车再生能量的即时利用,达到节约能耗目的. 当列车制动运行时,其产生的再生能量可供同一时间牵引运行的列车使用,其利用过程如图1所示.

图1再生能量利用过程示意图
Fig.1Schematic diagram of regenerative energy utilization process
图1中,列车i处于牵引阶段,列车j处于制动阶段,列车j制动产生的再生能量可被列车i即时利用,体现为路径1可行; 此外,当列车i牵引过程中所需的电能小于列车j产生的再生能量时,则多余的再生能量被轨旁电阻消耗,即路径2可行; 另外,当列车i所需的电能大于列车j产生的再生能量时,路径2将不存在,此时,牵引变电站将为列车i传输足够的电能以保证列车i的正常运行,体现为路径3可行.
3.1 能耗分析
牵引能耗在城轨列车各类能耗中占比最大,且是协同控制的优化对象,因此,站间总能耗主要指列车牵引所消耗的牵引变电站提供的能量. 列车i在某一站间总能耗Ei(单位: J,以下能耗/能量单位均为J)如式(3)所示:
(3)
(4)
(5)
(6)
其中: 代表列车i牵引能耗,代表列车j制动运行时的再生能量, 代表列车i 即时利用的列车j再生能量,代表列车i牵引运行时在t时刻的瞬时功率(单位: W),代表列车j制动运行时在t时刻的瞬时功率(单位: W),代表列车i在t时刻的牵引力(单位: N),代表列车j在t时刻的制动力(单位: N),表示为 [19]
(7)
其中: mi ,mj分别代表列车i和列车j的质量(单位: kg),ai(t),aj(t)分别代表列车i和列车j在t时刻的加速度(单位: m/s2),和分别代表列车i 和列车j在t时刻的基本运行阻力(单位: N),其中 [19]
(8)
其中代表列车i单位基本运行阻力(单位: N/kN).
由式(3)–(6)可知,当列车牵引力、制动力一定的情况下,列车牵引能耗和再生能量主要与列车速度和持续的时间有关,即和列车工况转换点的取值有关. 当牵引工况和制动工况有重叠时,式(5)可计算牵引工况列车吸收制动工况列车的再生能量,也是证明协同控制有效性的主要环节.
3.2 协同控制
在同一时刻,当不同列车的牵引和制动工况重叠时,再生能量通过接触网可以被即时利用,因此,通过增加城轨列车牵引和制动工况的重叠次数和时间,可有效提高再生能量的利用率. 基于不改变原有运行图(即保证原有的停车精度和准时性不变)的条件下,列车的起动牵引工况和制动工况变化相对较小,只有适时增加二次牵引工况才有提高再生能量利用率的可能. 因此,可将面向节能的协同控制转换为求解城轨列车二次牵引时刻tst(单位: s)及其对应的一次牵引最大速度vh1(单位: km/h). 列车协同控制原理如图2所示.
图2中,列车j为先行列车,列车i为后行列车,且列车j的制动工况与列车i的惰行工况重叠. t0为列车i 起动时刻,t1为列车i制动结束时刻,vh为列车i未协同时一次牵引最大速度,vh2为列车i协同后二次牵引最大速度,vmax为列车运行时最大限速. 当两列车不进行协同控制时,列车i的运行曲线如图2实线所示, Tp1,Tp2为列车i相应的工况转换点; 当两列车进行协同控制时,首先判断列车i的惰行工况与列车j的制动工况是否有重叠,有重叠时,确定列车j的制动时刻即为列车i的二次牵引时刻tst,同时,以列车i的一次牵引最低限速和列车运行最大限速为约束条件、以二次牵引时间最长为优化目标,反向推导列车i的一次牵引最大速度vh1,根据目标速度曲线计算公式,即式(1)–(2),计算协同后工况转换点Tp3,Tp4,Tp5,Tp6,最终得到列车i协同后列车运行曲线,如图2虚线所示.

图2列车协同控制原理图
Fig.2Schematic diagram of train cooperative control
列车i运行工况是否进行调整,即列车i是否能与列车j进行协同控制,主要取决于列车i与列车j在同一时间段内,其惰行工况与制动工况是否有重叠,为了提高再生能量利用率,需要尽可能多的提高列车协同次数,则以列车协同次数最多为优化目标,设计运行工况优化调整策略如式(9)所示:
(9)
其中,代表列车i在运营期间与其他列车协同控制次数,,代表列车i制动时初时刻和惰行时初时刻(单位: s),,代表列车j制动时初时刻和惰行时初时刻(单位: s).
基于线路、列车参数和站间运行时间,利用速度、位移方程生成多条站间运行曲线和相关参数变化曲线,如图3所示.
通过改变列车vh1的取值,生成不同的运行曲线(如图3(a)–(b)所示),并得到相应的二次牵引时刻,vh1 与tst以及参与协同控制时间的关系如图3(c)所示,图中cft和vhcf分别代表两列车协同初时刻(单位: s)以及 vh1对应的最小速度(单位: km/h).


图3运行曲线与相关参数变化趋势
Fig.3Variation trend of operation curve and relevant parameters
对图3(c)分析可知,当vh1 ≥ vhcf时,两列车可进行协同控制,且参与协同控制的时间随vh1增大而减小. 因列车i二次牵引时刻受列车j制动时刻影响,因此,当vh1 ≥vhcf时,列车i二次牵引时刻为tst = cft,且随vh1的增大保持不变; 显然,当vh1 = vhcf时,列车 i参与协同控制的时间最长. 对于∀vh1,vh1 ∈ [vhmin,vh],tst不存在,则列车i在该运行区间不能参与协同控制.
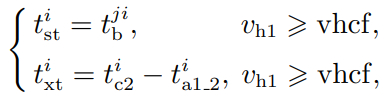
结合图3,将vh1与列车触发时刻tst、协同时间txt 相关联,得到关于txt目标优化的协同控制策略,如式(10)–(11)所示:
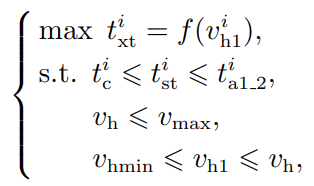
(10)
(11)
其中: 代表列车i最迟二次牵引开始时刻、二次牵引结束时刻(单位: s),代表列车i在相应行驶区间内列车j的制动时刻(单位: s).
根据协同控制策略和列车目标速度曲线计算公式获得列车协同后的工况转换点,进一步得到列车运行曲线,模型求解后,根据式(3)–(8)计算列车牵引能耗和所利用的再生能量.
4 模型求解
模型求解结合城轨列车实际运行工况,由列车目标速度曲线计算公式和协同控制策略可知,城轨列车节能运行模型关键问题是求解列车工况转换点,模型求解过程如图4所示.

图4模型求解过程
Fig.4Model solving process
由列车节能运行模型求解过程可知,列车目标函数求解的前提是操纵序列,即求解的方程组,一旦操纵序列更改,列车运行目标函数需重新计算调整.
模型中c123的取值直接关系到停车误差即εwc的值,关于c123的求解方法如下:
步骤 1 设c123初值为0,根据实际情况赋值列车初速度和初位移,求解方程组(1),得到城轨列车工况转换点速度和时刻的解析解;
步骤 2 由列车动力学方程求解城轨列车各工况行驶距离,进一步得到步骤1工况转换点条件下列车总行驶距离,并与实际站间距比较,得到停车误差 εwc;
步骤 3 如果停车误差εwc的绝对值大于设定的最大允许停车误差εset,则由式(12)更新c123值,返回执行步骤1,否则所得列车工况转换点的解即为满足要求的解.
(12)
其中: n为迭代次数,floor表示 向下取整.
基于线路、列车参数和站间运行时间,根据积分变量求解方法,在不同站区间参数下生成积分变量求解过程曲线,如图5所示.

图5积分变量迭代求解过程
Fig.5The process of iterative solution of integral variable
图5中,随着迭代次数的递增,积分变量最终收敛于某一值.
城轨列车满足协同条件时,在限速条件下为保证准时性,需要求解惰行工况时最迟二次牵引时刻,当协同时刻早于最迟二次牵引时刻,此时该城轨列车可在协同时刻进行二次牵引,即进行协同控制. 最迟二次牵引时刻求解方法如下:
步骤 1 根据求解得到的c123和式(1),求解工况转换点(vh,tc),(vl,tb)的值,令ta1_2 ,根据tc,ta1_2求得二次牵引前所行驶的距离stc(单位: m)和二次牵引时刻对应的初速度vtc(单位: km/h),同时为城轨列车站间剩余行驶距离srd(单位: m)赋初始值,即 srd = ssta;
步骤 2 令v0 = vtc,t0 = ta1_2,,根据式(1)求解二次惰行初速度、初时刻(vh2,tc2)和制动初速度、初时刻(vl2,tb2);
步骤 3 比较二次惰性初速度和最大限速的值,若vl2 >vmax,则由式(13)更新ta1_2值,若vl2 ≤vmax,且 vmax − vh2 >εh,εh为二次牵引最大速度误差,则由式(14)更新ta1_2值,重新赋值v0,t0和stc,执行步骤2,否则所求得的ta1_2即为最迟二次牵引时刻.
(13)
(14)
其中: α为收敛系数,n为迭代次数.
基于线路、列车参数和站间运行时间,根据最迟二次牵引时刻求解方法,在同等运行条件下,不同一次牵引最大速度vh1对应的最迟二次牵引时刻求解过程曲线如图6所示.
其对应的二次牵引最大速度求解过程曲线如图7所示.
由图6–7可知,随着迭代次数的递增,最迟二次牵引时刻收敛于某一值,其对应的二次牵引最大速度均满足限速要求.

图6二次牵引时刻迭代求解过程
Fig.6The process of iterative solution of the second traction time

图7二次牵引最大速度迭代求解过程
Fig.7Iterative solution process of maximum speed of secondary traction
5 仿真分析
1)线路及参数.
选择国内某条地铁线路06:28:06–06:44:33时间段列车运行情况为例,进行仿真分析. 该线路处于同一供电区,以其中两列车为仿真对象,其运行时刻表、线路各站间距、列车参数、模型求解过程参数如表1–4 所示.
2)节能分析.
在不改变原有运行图的条件下,本节将协同控制优化模型与现有运行模式进行对比,分析模型的节能效果. 其中现有运行模式采用牵引–惰行–制动节能操纵策略,根据文献 2,13] 究结果,单列车站间运行时采用该操纵策略较为节能.
表1列车运行时刻表
Table1Timetable of urban rail train

表2站间运行距离
Table2Distance between stations

表3列车基本参数
Table3Basic parameters of trains

表4模型求解过程参数
Table4Parameters of model solving process

根据线路及参数数据,按照现有运行模式,列车仿真运行曲线如图8(a)所示.
图8(a)中,列车2在站10–11的制动阶段,与列车1 的牵引阶段有重叠,如图中黑色虚线椭圆所圈位置,列车1利用了列车2的再生能量. 其他时间没有再生能量利用的情况发生.
引入本文所建模型后,列车仿真运行曲线如图8(b)所示. 列车1和列车2在图8(b)中画圈的位置进行了工况调整,增加了两列车牵引和制动运行工况重叠次数和时间.

图8列车运行时间–速度曲线
Fig.8Time–velocity curve of train operation
为了直观反映模型的节能效果,在上述条件下,分别对现有运行模式和引入模型后列车运行能耗进行仿真. 如图9–10和表5所示.
图9(a)中,列车1在站9–10、站10–11、站11–12、站 12–13间牵引运行时吸收利用了列车2的再生能量; 图9(b)中,列车2在站1–2、站2–3、站6–7间牵引运行时吸收利用了列车1的再生能量. 通过运行工况调整,虽然列车1和列车2的牵引能耗较现有运行模式有所增加,但是通过再生能量的利用,列车在各站间的实际牵引能耗都小于或等于现有运行模式的实际牵引能耗.

图9列车各站间牵引能耗
Fig.9Traction energy consumption between stations
图10(a)–(b)中,列车1,2自协同控制优化后,其在各站间运行的累计实际牵引能耗与现有运行模式之间的差值(即节约的能耗),呈逐渐增加趋势,列车1在 4个站间运行时吸收了列车2的再生能量,列车2在3个站间运行时吸收了列车1的再生能量,列车1较列车2 节约能耗更为明显.


图10列车牵引运行累计能耗
Fig.10Accumulated energy consumption of train traction operation
结合图8(b)可以得出,在约束条件下,增加列车协同次数和时间,可有效降低牵引能耗. 表5给出在现有运行模式下和采用本文优化模型后,列车1和列车2牵引能耗和利用再生能量对比情况.
仿真结果表明,采用本文所建模型后,在保证停车精度和准时性的前提下,列车1、列车2分别节约能耗占比24.29%和12.70%,再生能量利用率达42.46%和 41.96%,总节约能耗17.58%,总再生能量利用率由原有的6.29%提升至42.25%.
3)停车精度和准时性验证.
本模型的构建是以停车精度和准时性为前提,为了验证本模型的有效性,因此,还需对停车精度和准时性进行验证,仿真后,列车1和列车2的停车精度和准时性如表6所示,由表6可知,两列车的停车精度偏差都在0.3 m以内,准时性偏差都在1 s以内,符合停车精度和准时性要求.
表5现有运行模式和采用本文模型后列车利用的再生能量对比
Table5Comparison of regenerative energy used by trains under the existing operation mode and the model in this paper

表6列车停车精度和准时性
Table6Stop accuracy and punctuality of trains

6 结论
本文以保证城轨列车在各站点的准时性为前提,提出了一种面向节能的协同控制优化模型. 引入积分变量优化调节策略,保证了列车的停车精度和准时性; 通过构建的协同控制模型,求解得到二次牵引时刻及其对应的一次牵引最大速度,根据求得的列车工况转换点,生成协同后列车运行的目标速度曲线. 以国内某地铁线路06:28:06–06:44:33运行时间段为背景设计算例,在保证列车准时性以及不增加任何储能设备的同等条件下,对比现有的运行模式,节能效果明显. 以其中两列车为仿真对象,相互协同后,两列车总牵引能耗降低了 17.58%,总再生能量利用率由原有的 6.29%提升至42.25%.