摘要
为实现动态不确定环境下无人机集群行为的快速调控, 本文提出了一种仿慈鸦群信息交互的无人机集群协同转弯控制方法. 通过分析慈鸦群交互行为及信息传播过程, 分别建立了个体交互模型和信息传播模型, 并阐述了信息交互与集群运动的关系. 在社会力框架的基础上提出了集群动力学模型, 并将其映射到转弯信息驱动下的无人机集群协同转弯控制中. 仿真结果表明, 在个体交互、信息传播及集群动力学的作用下, 由少数无人机触发的转弯信息在集群中快速传播, 使群体形成一致响应, 实现了无人机集群的快速转弯机动.
Abstract
This paper presents a cooperative turning control method inspired by jackdaw flock information to achieve rapid adjustment of unmanned aerial vehicle (UAV) swarm in dynamic and uncertain environments. The models of the individual interaction and information propagation are established by analyzing the interactive behaviors and information propagation process of jackdaw flock. The relationship between the information exchange and swarm motion is also elucidated. The swarm dynamics model based on the social force framework is proposed and mapped to the coordinated turning control of the UAVs driven by turning information. Simulation results indicate that under the influence of individual interaction, information propagation, and swarm dynamics, the turning information triggered by some UAVs rapidly propagates, and enable the swarm to form a consistent response and thus achieve rapid turning maneuvers.
1 引言
近年来,无人机(unmanned aerial vehicle,UAV)集群凭借作战灵活度高、体系配合能力强、经济可承受等优势受到持续关注. 无人机集群协同作战在提高战场环境态势感知、认知能力的同时,从根本上实现从数量优势到非对称作战优势的转变 [1] . 在应对未来高动态不确定环境时,无人机集群可通过灵活机动转弯规避障碍、躲避敌方攻击以及占据有利位置. 因此,无人机集群的超机动能力、快速自适能力及自组织能力对提高无人机集群生存率及作战效能具有重要意义.
目前,无人机转弯控制研究大多针对于单无人机. 文献 [2]对单无人机轨迹规划中的转弯动作进行研究,但缺少对转弯控制过程的具体分析,同时该方法能否扩展到无人机集群还需进一步讨论. 文献 [3] 采用混合非线性动态逆的控制方法进行单无人机超机动控制,该方法同样没有扩展到无人机集群中. 文献 [4] 在Reynolds模型的基础上,在转弯速度不变的情况下,实现了少数固定翼无人机转弯角速度控制. 文献 [5] 利用人工势场法实现了无人机集群编队和轨迹跟踪控制,但在集群转弯过程中存在编队轨迹压缩、编队构型无法保持等问题. 文献 [6] 提出了一种基于改进社会力的集群转弯控制方法,将无人机简化为质点,但在转弯过程中存在集群形态松散、转弯调整时间较长等问题. 通过模仿椋鸟群的多种行为模式,文献 [7] 提出了一种动态环境下无人机集群转弯避障方法,但在避障过程中采用虚拟领导–跟随的方式,与真实椋鸟群集群行为存在一定差距.
自然界中存在广泛的“集群现象”,虽然个体感知/ 行动能力有限,且遵循行为规则简单,但集群可以保持高度协调一致的运动,并能够对环境变化作出快速响应 [8] . 随着传感器技术、信息技术的日趋成熟,鸟群聚集 [9]、避障 [10] 及决策 [11] 等复杂行为机制逐渐被揭秘. 通过对大规模椋鸟群三维数据统计分析发现,个体间的相互作用依赖于拓扑距离 [12-13] . 这种拓扑距离交互既有利于保持集群凝聚力,又有助于对抗扰动引起的群体密度变化. 考虑到鸟群集群行为与无人机集群之间存在诸多相似性,将鸟群行为机制应用到无人机集群对提高集群系统性能具有重要借鉴意义 [14-15],并且威胁信息、决策信息等在群体中的传播对集群行为有着重要的影响. 虽然慈鸦群规模庞大,但其整体机动性较强,同时不会破坏集群的完整性. 在转弯的过程中,只需由集群中若干个体发起,其转弯信息便能迅速传递至整个集群. 此外,慈鸦群在不同的环境下采用自适应交互模式,既有利于保持集群一致性行为,也有利于对环境等刺激作出快速响应 [16-17] .
作为集群行为研究的重要手段,集群运动建模大多集中于对集群运动行为的协调一致研究. 在集群逃逸行为中,文献 [18] 通过计算个体与捕食者的夹角进行决策转弯. 然而,当个体无法感知捕食者信息时,其动作得不到快速调控. 此外,信息感知与决策是集群快速适应环境变化、调节群体行为的一个重要方面 [19-20] . 而目前关于个体交互模式、信息感知以及信息处理等研究也相对较少 [21],很多集群模型采用平均化机制刻画个体间行为的一致性. 虽然在一定程度上可以滤除个体噪声的影响,但也可能使重要信息因过渡稀释而无法被察觉 [22] .
本文通过分析慈鸦群个体交互、信息传播以及集群行为的关系,提出了一种仿慈鸦群信息交互的无人机集群协同转弯控制方法. 首先研究了慈鸦群交互特性,分别建立了个体交互模型和信息传播模型. 其次,建立了集群模型与无人机集群协同的映射关系. 最后,通过多组仿真实验分析了本文所提方法在处理面向雷达等静态威胁时的有效性.
2 慈鸦群信息交互模型
2.1 交互行为建模
信息感知是集群决策的前提和基础,鸟群连贯一致的动作往往由局部个体激发,其中蕴含着丰富的信息 [23] .
慈鸦群在应激围攻行为和越冬返巢行为中表现出不同的交互行为. 通过分析航向与交互邻居数量和尺度距离之间的关联性发现,在应激围攻行为中,航向随着个体间尺度距离增大而增加,而与交互邻居数量关联性较弱. 在这种情况下,慈鸦群采用尺度距离交互便于及时获取威胁等刺激信息,并及时作出响应. 在越冬返巢行为中,集群航向角与交互邻居数表现出强相关性,个体与周围一定数目的个体进行信息交互,且呈现出各向异性的特征. 在这种情况下,慈鸦群采用拓扑距离交互可获得较高的行为极化指数. 以上分析表明,慈鸦群交互过程具有可塑性和自适应调节的能力 [16] . 此外,通过分析两种不同情境下关联长度与群体密度的关系发现,在越冬返巢行为中,速度与行为之间无特征尺度且与群体规模无关,进一步验证了慈鸦群中存在多种交互行为 [24] .
假设慈鸦群规模为N,个体i的位置为,在应激围攻行为中,个体最大感知范围为Rs . 当个体i与个体 j的欧氏距离小于其感知半径时(即),则称个体j为个体i的邻居. 因此,固定尺度距离的交互模型中个体i的邻居集合表示为
(1)
假设个体视场角范围为[−α,α],α ∈(0,π]. 在慈鸦群的越冬返巢行为中,以个体运动方向为参考中心线,将个体周围视场范围沿着自身运动方向按逆时针方向划分为M个夹角大小为2α/M的子区间,可以得到分布于M个角度区间的邻居个体. 从每个区间中选取一个与个体 i相对距离最小的个体作为邻居(即),则该交互模型的邻居集合可表示为
式中:表示个体i和个体j速度方向的夹角.
集群协同与决策是对感知信息的处理和加工. 因此,将交互集合重新定义为感知邻居集合和协同邻居集合,通常情况下,. 当感知邻居集合中出现个体响应刺激信息后,可通过信息交互实现信息在群体的快速传递; 在无刺激信息时,个体通过与协同邻居的交互实现集群行为的协调一致.
2.2 信息传播建模
结合慈鸦群不同行为的交互特点,将个体行为模式定义为跟随模式(local-following pattern,LFP)和应激模式(stimulation pattern,SP)两种. 其中,跟随模式是指在没有刺激信息驱动的情况下,个体倾向于与协同邻居行为保持一致; 应激模式是指在个体处理接收的刺激信息后,对刺激所作出的响应,两种行为模式之间也可以相互转换.
为进一步描述个体对刺激信息的接收–处理过程,建立了信息传播建模. 在信息传播过程中定义的个体信息状态分别为: 1)S1表示未接收到刺激信息的状态; 2)S2表示接收到刺激信息且待处理的状态; 3)S3 表示执行刺激信息的状态; 4)S4表示对刺激信息失去兴趣的状态. 通过个体信息状态转换,实现信息在群体中的传播、个体行为模式切换以及集群行为的演化. 图1为慈鸦群个体不同信息状态转移及模式切换关系图. 其中: 状态S1和S2对应于跟随模式,反映了信息的接收过程; 状态S3和S4对应于应激模式,反映了信息的处理过程. 只有在满足切换规则的情况下个体才能进入新的信息状态,否则保留当前状态,各状态切换规则具体如下:
规则1 为反映个体对信息的敏感程度,引入状态转移概率β ∈ [0,1],β值越大,个体对刺激信息越敏感,信息状态发生变化的可能性越大. 当状态S1个体的感知邻居集合中含有状态S2或S3的个体时,该个体以概率β切换为状态S2; 否则,以概率(1 − β)保留当前状态S1. 而当状态S1个体的感知邻居集合中无状态S2或S3个体时,表明该个体未接收到刺激信息,将继续保留当前状态S1.

图1信息状态及模式切换关系
Fig.1Information status and pattern switching relationship
规则2 慈鸦个体行为选择与其收益和代价有很大关系 [27] . 为保证局部行为和收益的一致性,设计了包含个体收益的状态转移概率更新策略.
假设t时刻个体i的收益为Ji(t),当协同邻居中状态S3个体增加时,该个体收益Ji(t)加1. 同时,利用 Sigmoid函数将个体收益映射到(0,1)概率空间,即
(2)
式中: Jth表示协同收益参数,χ >0表示状态转移调节因子.
此外,个体状态转移概率与历史行为及局部收益有关,个体响应刺激信息的概率随收益的增加而增大. 因此,状态切换概率的更新速度和概率值可表示为
(3)
(4)
(5)
式中:Pi,v(·)和Pi,x(·)分别表示状态切换概率更新速度和概率值; 表示协同邻居的平均收益; w1和w2 分别表示调节权重,用于平衡个体行为收益与局部协同收益之间的关系,且满足w1 + w2 = 1. 当个体状态切换概率大于设定阈值Pth时,该个体状态切换为状态S3,同时个体收益和切换概率变为0,否则,保持当前状态S2.
规则3 由信息状态定义可知,当个体响应刺激信息后,将逐渐对该信息失去兴趣,此时个体信息状态可能发生变化. 当局部运动一致性较差时,说明局部个体尚未完全响应刺激,此时个体不进行信息状态切换. 当局部运动一致性较高时,刺激信息得到有效传播. 考虑局部响应刺激行为的一致性,引入了局部序参量ϕi(t)和序参量阈值ϕth,并利用局部序参量对信息传播的局部效果进行度量,即
(6)
式中表示速度的模. 当个体局部序参量大于设定阈值ϕth时,个体状态转移为状态S4,否则,保持当前状态S3.
规则4 由图1可知,当刺激信息消失后,个体将恢复到未受刺激前的信息状态,且恢复时延越短,个体恢复到刺激前的信息状态越快. 假设步长为∆t,引入恢复时延τd = κ∆t(κ >0). 当状态S4保持时长大于τd时,个体信息状态将切换到状态S1,否则,保持当前信息状态S4.
为进一步阐述集群信息交互与协同行为之间的关系,给出了信息交互驱动下的集群行为演化过程,如图2所示,圆圈区域表示个体感知范围(对应感知邻居集合),虚线连线表示协同邻居(对应协同邻居集合),实线箭头表示刺激前的个体速度方向. 某一时刻,当集群中某个个体(编号7为状态S3)突然受到刺激,速度方向发生变化. 通过个体间的交互与信息传播,其他个体信息状态也随之发生变化(编号1和5为状态S1,编号2,6和8为状态S4,编号3和4为状态S2). 因此,越来越多的个体在响应刺激信息后改变速度方向,使集群行为重新趋于一致.

图2信息交互与协同行为的关系
Fig.2The relationship between information exchange and cooperative behavior
3 无人机集群协同转弯控制
战场环境瞬息万变,突发障碍或威胁对无人机集群的飞行安全性提出更高要求. 当无人机感知到危险时,通过模仿慈鸦群的信息交互机制可实现无人机集群的快速转弯,进而提高集群作战的灵活性.
3.1 无人机模型
假设每架固定翼无人机均配有速度、航向角和高度回路的自驾仪. 对无人机i,按照水平方向和垂直方向将其状态量分解,可得到以速度、航向角和高度为控制指令的6态简化模型[28],即
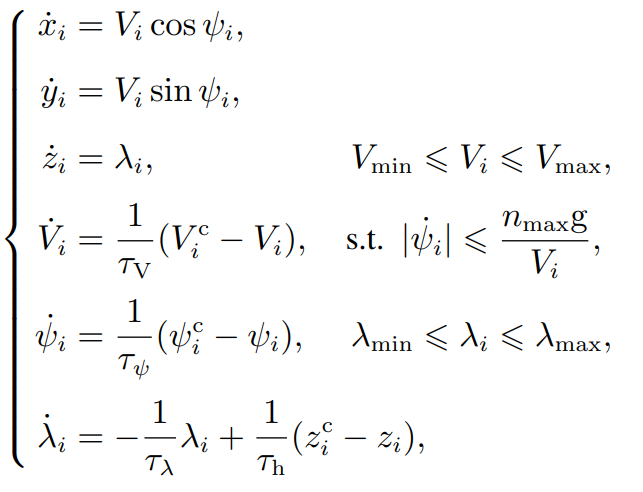
(7)
式中:(xi ,yi,zi)表示无人机i的三轴位置; Vi ,ψi和λi 分别表示无人机i的水平速度、航向角及高度变化率; 分别表示无人机i自驾仪的水平速度、高度及航向角控制输入指令; τV,τψ和(τλ,τh)分别表示自驾仪控制参数. 此外,无人机本体应满足最大/最小速度、横侧向过载以及高度变化率约束.
3.2 基于社会力的集群动力学模型
通常情况下,集群动力学模型采用位置和速度进行描述. 由社会力框架可知,个体间基本作用力由位置控制力和速度控制力组成,并遵循“分离、聚集、一致”三原则,即
(8)
(9)
式中: pi和vi分别表示个体i(i = 1,2,· · ·,N)的空间位置和速度,N表示集群规模; upos表示位置控制力,它遵循“远距吸引–近距排斥”原则,基于个体与邻居的相对位置关系调节个体间的分离和聚集; uvel表示速度控制力,用于描述个体间速度的相互影响关系,对应于一致性原则.
水平方向所受社会力合力可表示为
(10)
式中
为避免与交互范围内的邻居发生碰撞,在排斥力的作用下,个体朝着邻居位置相反的方向运动. 慈鸦群个体间的排斥力表示为
(11)
式中: kr >0 表示排斥力系数,ε >0 表示无穷小量,表示个体 i与邻居 j 的水平距离矢量,为水平距离标量.
在吸引力的作用下,个体朝着邻居中心位置运动. 慈鸦群个体间的吸引力表示为
(12)
式中ka1 >0表示吸引力系数.
在一致力的作用下,个体与邻居速度保持一致. 慈鸦群个体间的一致力表示为
(13)
式中ka2 >0表示一致力系数.
通过对慈鸦群成对个体空间相对位置与受力分析可知,个体在进行转弯时受侧向转弯力的影响较大. 同时,为节省转弯过程体力消耗,慈鸦群尽量通过改变航向来调节状态 [17] . 因此,认为个体运动中速率几乎保持不变,交互的信息主要是速度方向,增加的速度保持力表示为
(14)
式中: τs表示速度时延, v0表示期望水平速度大小,vi(·)表示当前水平速度大小,表示水平速度方向.
垂直方向一致性控制协议可表示为
(15)
式中: kz >0表示高度反馈增益,kv >0表示速度反馈增益.
3.3 慈鸦群信息交互行为映射
为实现慈鸦群信息交互行为与无人机集群映射,图3为无人机集群协同控制框架,包括: 顶层协同控制器、线性化预处理、指令解耦控制器、无人机模型以及状态观测器. 顶层协同控制器生成无人机期望控制指令; 线性化预处理和指令解耦控制器用于获得无人机水平方向和垂直方向的期望状态; 状态观测器可实时反馈无人机当前状态. 利用式(11)–(16)计算所得的集群控制量,通过指令解算可以得到自驾仪的3个控制输入,即
(16)

图3无人机集群协同控制框架
Fig.3Cooperative control framework of UAV swarm
令无人机模型的状态量与集群动力学模型的对应关系可表示为
(17)
图4为仿慈鸦群信息交互的无人机集群协同转弯控制流程图,具体实现步骤如下:
步骤1 初始化集群无人机的状态,包括位置、速度及信息状态等;
步骤2 对于每架无人机,根据式(1)–(2)分别选择与其有交互行为的感知邻居无人机和协同邻居无人机;
步骤3 每架无人机可自主判断是否探测到外界威胁信息或接收到交互邻居传递的威胁信息. 当有无人机探测到威胁信息后,其行为模式切换为应激模式,信息状态切换为S3,并自主转弯躲避威胁; 否则,根据式(8)(11)–(18)进行协同控制.
步骤4 根据规则1判断无人机是否接收到威胁信息,信息状态是否切换到S2. 如果满足规则1,根据式(3)–(6)计算无人机协同收益及状态转换概率; 否则,根据式(8)(11)–(18)进行协同控制.
步骤5 根据规则2判断无人机信息状态是否切换到S3. 如果满足规则2,无人机切换到应激模式,执行转弯角度(或角速度)指令; 否则根据式(8)(11)–(18)进行协同控制.
步骤6 根据规则3判断无人机信息状态是否切换到S4(式(7)). 如果满足规则3,由规则4继续判断邻居无人机信息状态是否切换到S1. 如果满足,则无人机切换到跟随模式; 否则,执行转弯角度(或角速度)指令.
步骤7 判断当前威胁是否解除,如果解除,则任务结束; 否则,转到步骤2继续执行.
3.4 集群运动评估指标
在集群运动评估中,常采用序参量描述集群运动同步程度(即归一化后的群体速度)[29],序参量定义为
(18)
式中: N表示集群规模; vi(·)表示t时刻个体i的速度; 并且ϕ(·)∈ [0,1]越大,集群运动的一致性程度越高,集群的有序性越好.
集群行为响应快慢是衡量集群受到威胁或刺激的一个重要指标 [30],常采用应激精度衡量. 假设刺激前集群运动方向稳定在ψ0,某一时刻刺激方向为ψsti,集群在响应刺激后的运动方向为ψi ,则集群运动新方向和刺激方向的一致程度可表示为 [19]
(19)
式中: ⟨ψi,ψsti⟩ ∈ [−1,1]表示方向ψi和ψsti的夹角余弦. 同理,⟨ψ0,ψsti⟩ ∈[−1,1]. Θ0 ∈[0,1]和Θ ∈[0,1] 分别反映了集群在受刺激前后,集群运动方向与刺激方向的一致程度. 当集群运动新方向与刺激方向一致时,Θ = 1.
应激精度定义为
(20)
当集群中所有个体的运动方向保持原方向不变时,ϑsti = 0; 当集群所有个体跟踪上刺激方向变化时,ϑsti = 1.

图4无人机集群协同转弯控制流程图
Fig.4Flow chart of cooperative turning control of UAV swarm
4 仿真结果
结合慈鸦群转弯行为特性,本部分进行了恒定转弯角度(情况1)和恒定转弯角速度(情况2)下的无人机集群转弯行为仿真. 假设初始时刻集群已达到稳定聚集的状态,且机间通讯质量良好. 无人机集群规模为N = 200,仿真步长为0.05 s,仿真时长为30 s. 交互模型和信息传播模型参数分别为: Rs = 100,α=π,β = 0.7,M = 6,Jth = 3,χ = 5,ω1 = ω2 = 0.5,Pth = 0.9,ϕth = 0.9,κ = 10. 集群运动模型参数分别为: kr = 2.5,ka1 = 0.01,ka2 = 4.5,τs = 1,kz = 0.1,kv = 0.1. 无人机模型参数分别为: τV = 3,τψ = 0.1,τλ= 0.3,τh = 1,Vmin = 5 m/s,Vmax = 25 m/s,nmax= 5 m/s2,g = 10 m/s2,λmin=−5 m/s,λmax= 5 m/s. 对比方法为一种基于注意力机制的集群模型. 通过计算邻居个体行为的显著度判断其是否处于激发状态[21] . 只有当周围邻居某一个体的显著度大于设定阈值时,才认为该个体受到有效的新异刺激,其状态从普通状态转化为激发状态. 结合对比方法的参数设置,将显著度阈值设为0.6,仿真结果如图5–6所示. 此外,仿真环境为MATLAB 2018a,Windows10 64位操作系统.
情况1 初始时刻无人机航向均为ψ0 = 0,v0 = 5.5 m/s,信息状态为S1. 当t = 1.25 s时,集群中不同位置的10架无人机发出转向信号(信息状态变为S3),航向变为ψsti = ψ0 + 3π/4. 图5为转弯信号传播前后无人机集群的空间轨迹、速度、序参量及应激精度等结果. 由图5(a)可知,由局部少数无人机触发的转弯信息在集群中得到了有效的传播,使集群快速完成转向动作,图中红色实线表示无人机集群中心的运动轨迹,三角形朝向表示航向. 由图5(b)可知,转弯前后无人机集群的速度能够保持较好一致性. 由图5(c)–(d)可知,在信息传播过程中,两种方法的序参量均呈现先下降后上升收敛的趋势,虽然本文方法序参量值较对比方法变化幅值大,但序参量变化调整时间更短,同样可以使集群行为保持较高的一致性. 两种方法的应激精度曲线均呈现上升并逐渐收敛的趋势,表明集群均能跟随上刺激方向的变化,但本文方法在信息传播的速度和调节时间上存在明显优势. 图5(e)为无人机集群信息状态曲线,反映了信息传播的动态演化过程. 从局部放大图可知,在转弯信息发出后,状态S1无人机数呈下降趋势,状态S2和S3无人机数呈上升趋势,表明更多的无人机在接收到转弯信号后对该信息进行处理. 按照信息状态的切换规则可知,在一定时延后,状态S4无人机数逐渐增多,状态S1,S2和S3的无人机数呈下降趋势. 当整个无人机集群完成对刺激信息响应后,状态S1无人机数恢复到最高值,实现了集群的快速转向,验证了所建立的交互模型、信息传播模型的有效性.
情况2 将速度提高到v0 = 20 m/s,转弯恒定角速度为0.1 rad/s,无人机期望飞行高度为100 m,其他参数保持不变. 在t = 0.5 s之前,无人机之间通过协同交互进行运动控制; 在t = 0.5 s时,当无人机集群中的某些无人机感知到威胁时,通过传递角速度信息转弯躲避危险. 结合慈鸦群信息交互模型和集群动力学模型,对无人机集群转弯控制进行仿真验证. 图6为转弯信号传播前后无人机集群的速度、航向及空间轨迹等结果.


图5无人机集群协同转弯(情况1)
Fig.5Cooperative turning of UAV swarm (Case1)
由图6(a)可知,在转弯信息发出的较短时间内,无人机集群的水平速度出现轻微波动. 这是由于在转弯信息传播过程中,已接收转弯信息的无人机按照设定的角速度进行转向,而未接收到转弯信息的无人机则根据协同邻居进行速度调控. 随着转弯信息的扩散,更多的无人机在接收到转向信号后按照设定的角速度进行方向调节,并且在所有无人机处理完转弯信号后,无人机集群水平速度又逐渐趋于一致. 图6(b)为无人机集群垂直方向速度和航向的变化曲线. 由图6可知,无人机集群垂直方向速度逐渐收敛到0,此时无人机集群处于期望高度. 在转弯信号传播期间,无人机集群航向角变化趋势与相同时间段的水平速度类似,都是在短暂调整后,无人机集群航向角变化趋于一致. 由图6(c)所示,无人机集群在整个转弯过程中转弯半径相同,集群形态几乎没有变化,无人机集群达到预测的转弯效果,且相较于图5(a)轨迹更加平滑. 通过个体间信息交互,触发转弯的无人机将转弯信息有效地传播到无人机集群,在维持无人机集群稳定的同时,验证了仿慈鸦群信息交互模型和转弯控制的有效性.
5 结论
借鉴慈鸦群高效信息交互行为,本文提出了一种仿慈鸦群信息交互的无人机集群转弯控制方法,建立了集群模型与无人机集群协调控制之间的映射关系,并对无人机集群协同转弯行为进行仿真. 仿真结果表明,局部少数无人机触发的转弯信息在集群中得到有效传播,使无人机集群具备快速应对不确定环境的能力. 相较于传统的无人机集群转弯控制方法,仿慈鸦群转弯控制方法具有转弯时延短,转弯效率高的优势,提高了集群系统的稳定性和可靠性. 本文仅讨论了单一转弯信息传播情况下的无人机集群控制,且没有对稳定性和收敛性进行理论分析,下一步将展开对不同类型信息下的信息传播行为、集群行为决策及状态演化过程的理论分析研究,并利用无人机集群协同控制框架的分层结构设计集群系统,在保证无人机本体飞行安全的前提下,实现集群系统功能的快速移植.


图6无人机集群协同转弯(情况2)
Fig.6Cooperative turning of UAV swarm (Case2)