摘要
由于难以精确建立具有输入约束的非线性积分系统模型, 限制了基于模型的控制算法实施. 针对存在积分环节的非线性系统, 通过引入微分滤波器将难以控制的临界不稳定系统转化为等效的非线性稳定系统, 并采用基于数据驱动技术的无模型自适应控制算法进行控制. 为了解决控制过程中的输入约束问题, 将损失函数转化为具有约束的二次规划问题进行求解以获取最优控制输入. 同时, 利用跟踪微分器对测量输出信号进行估计以抑制随机测量噪声对控制器参数求解的影响, 并对所设计的控制算法进行稳定性分析. 最后, 验证了所提出算法的可行性和优越性.
Abstract
It is difficult to accurately establish model for nonlinear systems with input constraints and integrating factor, which may limits the implementation of model-based control algorithms. Considering that the nonlinear system with integrating factor is difficult to control, the critical unstable system with integrating factor can be transformed into an equivalent nonlinear stable system by constructing differential filter, and a model-free adaptive control (MFAC) algorithm based on data-driven technology is used to control the nonlinear system. In order to solve the input constraint problem in the control process, the loss function is transformed into a constrained quadratic programming problem to obtain the optimal control input signal. Besides, a tracking differentiator is used to estimate the output signal to suppress the influence of random measurement noise on the calculation of controller parameters. The stability of the designed control algorithm is also analyzed in detail. Finally, the feasibility and superiority of the proposed control algorithm are verified.
1 引言
具有积分特性的非线性系统属于临界不稳定系统,对其进行精确控制具有很大挑战 [1] . 积分因子会改变输入信号的可持续激励性,对其进行建模也有难度 [2] .这就限制了基于模型的控制算法对具有积分特性的非线性系统的控制与应用 [3] . 对于具有输入约束的积分系统,若不对其输入进行限制,系统输出响应会有较大的安全隐患和动态响应等问题 [4] . 现有无模型自适应控制(model-free adaptive control,MFAC)算法,难以对于存在输入约束的非线性积分系统取得满意的控制效果 [5],实现对具有输入约束的积分系统的精确控制是本文研究的重点.
MFAC是一种基于数据驱动的控制策略,具有结构简单、适合多变量和非线性系统控制等优势. 其一直受到国内外科研工作者的广泛研究 [6] . 针对多输入多输出非线性系统,文献 [7]提出了一种基于不同控制参数的紧格式MFAC控制方法. 文献 [8] 提出了一种基于虚拟传感器技术的无模型自适应容错控制策略. 对存在输入约束的系统进行控制,限幅策略可能会改变控制器的稳定性和精度 [9] . 文献 [10] 通过在控制输入准则函数中引入执行器输入饱和约束条件,以获取 MFAC控制算法的最优控制输入. 将约束条件融入到控制目标损失函数中,并对其进行整体求解是解决约束控制问题的常用策略 [11] . 具有积分特性的系统处于临界不稳定状态,高信噪比测量噪声和扰动会影响控制器的稳定性 [12] . 可以考虑利用滤波技术对输出测量信号进行估计 [13] . 但是对于模型未知的系统,现有的卡尔曼滤波算法、粒子滤波算法等先进的滤波算法无法应用,需选择不依赖系统模型的滤波器对输出测量信号进行估计. 融合中间变量的观测技术也是提高控制算法性能的常用策略 [14] . 现有研究成果指出 MFAC难以对积分系统获得满意的控制效果 [15] . 因此,综合考虑输入约束、积分特性、非线性、测量噪声等因素,设计能实现精准跟踪控制的MFAC控制方案是本文研究的重点.
本文利用MFAC技术对工业过程中普遍存在的具有输入约束的非线性系统进行精确控制研究. 对于系统存在的积分特性通过构造微分滤波器对控制输入信号进行处理,将难以控制的临界不稳定系统转化为等效的非线性稳定系统进行控制. 将输入约束条件融入到控制目标的损失函数中,构造成具有约束的二次规划问题,以获取最优控制输入,并利用跟踪微分器对测量输出信号进行估计以抑制随机测量噪声对控制器参数求解的影响. 最后,利用实验验证所提控制算法的有效性和优越性.
2 问题描述
考虑如下具有积分特性的非线性离散系统:
(1)
其中y(k)∈ 和u(k)∈ 表示系统的输出和输入,ny 和nu是两个未知的正整数,f(·): 为未知的非线性函数.
在离散域中,式(1)可以表示为
(2)
其中: m是积分因子个数,G(y,u)是系统未知函数.
不失一般性,做出以下假设和定理.
假设 1 除有限时刻点外,f(· · ·)关于第(ny+ 2)个变量的偏导数是连续的.
假设 2 除有限时刻点外,式(1)满足广义Lipschitz条件,即对任意k1 ≠ k2,k1 ≥ 0,k2 ≥ 0和u(k1)≠ u(k2)有
(3)
其中b >0是一个常数.
定理 1 对于满足假设1和2的系统(1),当 |∆u(k)|= |u(k)− u(k − 1)| ≠ 0 时,则存在时变 ϕc(k)∈ ,使得式(1)可转化为紧格式动态线性化(compact form dynamic linearization,CFDL)模型
(4)
其中: ϕc(k)对任意时刻 k 有界,∆y(k + 1)= y(k+ 1)− y(k).
同时考虑,在系统(1)中存在如下输入约束:
(5)
3 具有输入约束的无模型自适应控制算法
本文利用微分滤波(1 − z −1)m对控制器输出信号进行微分滤波处理. 考虑如下控制输入准则函数:
(6)
其中: λ >0为权重因子,yd(k + 1)为期望输出.
把式(4)代入式(6),并令Ep(k)=yd(k+1)− y(k),则
(7)
式(7)可以转换为二次规划问题进行求解,即
(8)
由于 与 无关,则利用J0()求最优 时,(k)可以从式(8)中去除,即J0(∆u(k))等价为
(9)
其中: H =((k)+ λ),g = −2Ep(k)ϕc(k).
约束(5)可转化为与控制增量相关的线性不等式
(10)
用矩阵表示为
(11)
其中

结合式(11),式(7)可等价转化为
(12)
若优化算法求得最优控制增量∆u ∗(k),则
(13)
其中ρ ∈(0,1]为步长因子.
在求解式(12)时,需已知 ϕc(k). 考虑以下关于 ϕc(k)的估计值的目标函数:
(14)
其中 µ 是ϕc(k)的估计值变化量的惩罚因子,则 J((k))关于(k)的偏导数可以表示为
(15)
令 = 0,并加入步长因子 η ∈(0,2],可得 (k)的估计值为
(16)
由于系统带有积分特性,常规的控制输入可能会导致系统出现发散. 可以考虑对控制输入信号利用微分滤波器(1 − z −1 )m处理,将临界不稳定系统转化为等价的稳定系统. 滤波后的控制输入信号为
(17)
由于含噪声输出数据对控制器信号的求解和时变ϕc(k)的估计有很大影响. 可以利用跟踪微分器对输出信号进行估计. 考虑带有测量误差的模型
(18)
其中: y(k)是无噪声输出信号,ym(k)是测量信号,v(k)是有界的噪声信号.
利用如下离散跟踪微分器对ym(k)进行估计:
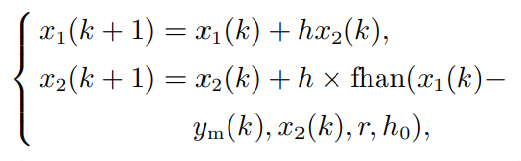
(19)
其中fhan(x1(k)− ym(k),x2,r,h0)可以表示为
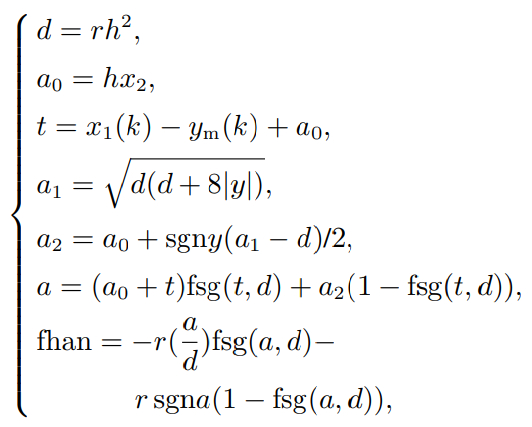
(20)
(21)
其中: sgn(k)为符号函数,x1(k)为输出估计,x2(k)为输出微分估计,ym(k)为输入信号,h为滤波因子,a0,a1,a2和d均为中间变量, r为速度因子. 速度因子和采样时间的取值应权衡跟踪效果和相位延迟的影响. 跟踪微分器对输出ym(k)进行去噪,得到去噪输出信号 (k)= x1(k). 经滤波后的紧格式数据模型表示为
(22)
利用以下重置算法增强对ϕc(k)的更新:
(23)
并结合跟踪微分器算法式(18)–(22),本文所提出的具有输入约束的MFAC控制律计算公式为式(12)–(13)(16)–(17),控制方案如图1所示.
4 控制算法稳定性分析
假设 3 对任意时刻k和∆u(k)≠ 0,ϕc(k)的符号保持不变.
定理 2 对于式(1),在假设1–3满足的条件下,当 yd(k + 1)= yd = const时,本文所提控制算法存在一个正数λmin >0,使得当λ >λmin时有
1)闭环系统的输入输出有界;
2)系统输出跟踪误差单调收敛,且 y(k + 1)| = 0.
证存在输入约束情况下,测量噪声有界且满足假设2,则系统的输入输出必有界,且式(1)成立.

图1所提控制算法框图
Fig.1Block diagram of the proposed control algorithm
当满足下列条件之一,则有界.

当不满足以上条件时,可以证明 也有界. 通过定义 = −ϕc(k)为估计误差,在式(16)两边同时减去ϕc(k),则
(24)
把CFDL 模型代入式(24),并对式(24)两边取绝对值,得到
(25)
由于 对∆u 2 (k − 1)是单调递增,其最小值为 . 当0 <η ≤ 1和µ >0时,存在d1,满足
(26)
根据定理1中,|ϕc(k)| ≤ ,则|∆ϕc(k)| ≤ 2 ,利用式(24)–(25),有
(27)
因此,有界. 由于ϕc(k)也有界,故有界.
对于无约束的二次规划问题式(12)可得到
(28)
对于存在约束的情况,则有
(29)
定义系统跟踪误差为
(30)
结合式(29)把CFDL 模型(4)代入式(30),两边取绝对值,则
(31)
根据定理1中的结论|ϕc(k)| ≤ ,以及ϕc(k)有界、不等式 α2 + β 2 ≥ 2αβ、重置算法确保 >ε 和 的有界性,可得
(32)
结合式(23)可知ϕc(k) >0. 令λmin = ,若取 λ >λmin,则存在0 <M1 <1,使得
(33)
根据式(33)、0 <ρ ≤ 1和λ >λmin,则存在 d2 <1,使得
(34)
结合式(31)和式(34)有
(35)
因此,.
对y(k)和滤波后信号定义
(36)
其中|ω|是一个小正数,可得
(37)
从式(35)可知
(38)
因此,可得. 证毕.
5 实验验证
本文测试的雕刻机系统如图2所示. 利用速度模式对雕刻机系统进行控制. 以位置为输出量的伺服系统模型为积分类模型. 输入控制量单位为r/min; 输出位移量单位为mm. 跟踪信号设置为yd(k)= sin(0.01πk). 系统输入所受约束设置为u(k)∈ [−80,80].

图2雕刻机系统
Fig.2Engraver system
本文所提控制算法参数设置为η = 1,µ = 0.1,ρ = 0.5,λ = 10−8, = 10−4和ε = 0.1. 跟踪微分器参数设置为h = 0.01 和r = 100. PID算法也进行了对比测试,其参数设置为Kp = 1000,Ki = 1000 和Kd = 1000. 采样周期为T = 5 ms,共采N = 1000 点. 两种控制算法所得控制输出跟踪结果与对应的控制输入信号,如图3所示. 跟踪微分器对含有测量噪声的输出所进行的估计结果,如图4所示. 两种控制算法的输出跟踪误差,如图5所示. 本文所提控制算法的EMAE = 和EMSE = 对比的限幅PID控制算法的 EMAE = 0.166 1和EMSE = 5.895 7. 测试结果表明,在输入约束限制下,PID控制算法的具有较大的跟踪误差和不稳定性. 而本文所提控制算法有很好的快速性和稳态精度,且易于工程实施. 在跟踪正弦波信号时,跟踪微分器带来的相位延迟和稳定性影响并不明显.

图3输出跟踪结果与控制输入信号 Fig.
3 Output tracking results and control input signals

图4跟踪微分器的估计结果
Fig.4Estimation of the tracking differentiator
6 结论
对于存在输入约束的非线性积分系统,通过对控制输入信号进行微分滤波将其转换为等效的非线性稳定系统. 为降低控制过程中在存的测量噪声和扰动的影响,利用跟踪微分器对输出信号进行滤波. 将输入约束融入到控制目标的损失函数中,构造具有约束的二次规划问题,并优化获取最优控制输入. 同时分析和证明了所提控制算法的稳定性. 对比试验测试结果,验证了所提控制算法的有效性和优越性. 本文所提控制方案可扩展到用于解决其他更复杂多变量系统的约束控制问题.

图5输出跟踪误差对比
Fig.5Comparison of output tracking errors