摘要
针对地铁列车系统非严格重复运行的特性, 提出了一种运行时间区间可变的地铁列车无模型自适应迭代学习控制算法. 首先, 利用紧格式动态线性化方法将地铁列车动力学模型转化为等价的数据模型; 其次, 仅利用系统输入/输出数据设计了一种适用于地铁列车迭代时间长度随机变化的改进无模型自适应迭代学习控制算法; 最后, 给出了该算法的收敛性分析, 并通过仿真验证了所提算法的有效性.
关键词
Abstract
For the characteristics of non-strict repetitive operation of subway train, a model-free adaptive iterative learning control algorithm for subway trains with variable operation time interval is proposed. Firstly, the compact format dynamic linearization method is used to convert the subway train dynamics model into an equivalent data model; Secondly, an improved model free adaptive iterative learning control algorithm for the random change of subway train iterative time length is designed using only the input/output data of train system. Finally, the convergence analysis of the proposed algorithm is presented, and the effectiveness of the proposed algorithm is verified through simulation.
1 引言
为提高地铁列车系统的安全性与可靠性,列车自动运行(automatic train operation,ATO)系统已广泛应用于现代列车系统中 [1] . 目前,已有多种控制策略被用来实现列车调速,如PID控制 [2]、自适应控制 [3]、最优控制 [4] 等控制方法.
然而,上述控制算法大多都是基于模型已知的列车运行控制算法,其控制策略设计与稳定性分析需要模型信息. 因此,如何实现仅利用地铁列车运行过程中的数据,设计地铁列车运行的数据驱动控制方法是一件具有理论和实际应用价值的工作. 无模型自适应控制(model-free adaptive control,MFAC)是由侯忠生教授 [5] 于1994年提出的,其基本思想是利用动态线性化方法及伪偏导数(pseudo partial derivative,PPD)概念,将控制系统动力学模型转化为等价的动态线性化数据模型,然后基于该数据模型进行控制系统设计与分析. 该方法突出特点是其控制系统设计和分析仅与测量的I/O数据有关. 目前,MFAC已成功应用于列车运行控制系统中. 文献 [6-7] 分别提出了基于紧格式动态线性化和偏格式动态线性化数据模型的无模型自适应容错控制方案用于,处理地铁列车运行过程中可能出现的各种故障.
另外,地铁列车系统具有高度重复的运行模式,迭代学习控制(iterative learning control,ILC)是一种适用于解决在有限时间区间重复运行问题的控制算法. 因此,在列车运行控制系统中引入ILC,可以充分利用列车运行的重复性,通过不断学习实现对列车期望输出的精确跟踪. ILC最早于1984年提出,并在理论和应用方面取得了丰富成果 [8-13] . 文献 [14] 最早将 ILC 方法应用于列车的自动驾驶中,与基于反馈的控制策略不同,该方法能够利用列车以往运行的信息调整当前的控制输入,实现对列车运行的精确跟踪. 文献 [15] 提出了一种针对列车停车控制的终端ILC方法.
进一步,无模型自适应迭代学习控制(model-free adaptive ILC,MFAILC)作为 MFAC 在迭代域上的拓展,也可实现重复运行的未知非线性系统的控制问题,不需要模型,且可保障所设计控制算法在2模意义下的单调收敛. 目前,MFAILC在列车控制方面已得到应用. 文献 [16] 将ILC前馈和MFAC反馈组成的双回路控制器应用于列车的速度跟踪控制,实现了MFAC 与ILC的优势互补. 文献 [17] 将MFAILC 用于列车的容错控制中,该方案可以提高列车运行安全可靠性.
然而,在实际应用中,由于列车运行环境复杂多变、存在各种不确定性、扰动等因素,地铁列车每次运行时间长度可能随迭代变化,列车运行时间区间长度可能每次都不完全重复. 文献 [18] 提出一种模糊ILC 算法,适用于具有随机变化操作长度和系统约束的高速列车. 文献 [19] 提出了一种改进的P型ILC算法,首次对非严格重复的高速列车运行系统进行了变迭代长度设计. 到目前为止,还没有将迭代运行时间长度随机变化的MFAILC应用于列车系统中.
本文针对地铁列车运行时间随机变化的实际情况,研究了一种运行时间区间可变的地铁列车无模型自适应迭代学习控制算法. 首先,将动态线性化技术应用于沿迭代方向的地铁列车系统; 其次,针对地铁列车运行时间可能出现非严格重复的控制过程,引入自适应机制,进而提出了一种新的地铁列车运行时间长度随机变化的MFAILC算法; 然后,对其进行理论分析,证明系统跟踪误差是收敛的; 最后,通过仿真实例验证了所提算法的有效性.
2 严格重复运行地铁列车控制问题描述与 MFAILC算法设计
根据牛顿力学定律,将含有n节车厢的地铁列车简化成单质点动力学模型,并对其进行受力分析,如图1所示.
图1中,FN是支持力,G是列车重力,uf(k)是列车牵引/制动力,fa(s)是列车在坡道、弯道、隧道产生的附加阻力,fb(v)是基本阻力,v(k)是列车速度,s是列车位移,k是任意时刻.

图1地铁列车单质点模型
Fig.1Point model of subway train
如果则uf(k)是牵引力,否则是制动力. 根据牛顿第二定律,对地铁列车单质点模型进行受力分析,可将其描述为 [20]
(1)
(2)
(3)
其中: M是列车的总质量; Ts是采样时间; x表示附加阻力系数; ‰(s)表示对应位置 s 处的斜率角; b0(k),b1(k),b2(k)表示基本阻力系数.
注 1 由于地铁列车长度、横截面积等物理特性以及空气动力学等的变化,采用时变阻力系数b0(k),b1(k), b2(k)比常数更能合理地描述列车的真实动力学.
考虑到了如附加阻力系数x、基本阻力系数b0(k),b1(k),b2(k)等受环境和列车型号的影响较大,列车附加阻力fa和基本阻力fb也很难精确获得,另外,地铁列车运行过程中列车质量M也不断变化,因此,列车模型很难精确获取,而模型一旦不准确,那么基于模型的控制方案的运行控制效果就可能受到很大影响. 然而列车运行过程中,其输入数据是列车的牵引/制动力,输出数据是列车的速度,可以容易测量. 从系统和控制的角度分析,列车系统可以看成是一个未知的离散时间非线性系统 [21],即
(4)
其中: f(·)是未知非线性函数,i是迭代次数,v(k,i)和uf(k,i)分别是列车系统第i次运行k时刻的输出速度和牵引/制动力,nv和nu是两个未知的正整数.
假设 1 f(·)关于控制输入uf(k,i)的偏导数是连续的.
假设 2 系统(4)沿迭代轴方向满足广义Lipschitz条件,即对和当时,有
其中: Td是地铁列车的期望运行时间长度,∆v(k+1,i)= v(k+1,i)−v(k+1,i−1),∆uf(k,i)=uf(k,i)− uf(k,i−1),p>0是一个常数.
注 2 假设1是列车控制器设计的一种常见假设,并很容易从式(1)–(3)得到验证. 假设2是地铁列车系统固有的力学特性,是对由控制输入沿迭代轴方向变化引起的列车系统输出变化率上界的一种限制. 从能量角度来看,有界的输入能量变化应产生有界的输出能量变化,是对实际系统的一种物理约束 [5] .
引理 1 考虑满足假设1和假设2的地铁列车系统(4),当时,一定存在一个被称为PPD 的迭代相关时变参数ϕc(k,i),使得系统(4)可转化为如下沿迭代轴的CFDL数据模型:
(5)
且对于任意时刻k和迭代次数i,ϕc(k,i)是有界的.
引理1详细证明可见参考文献 [5].
给定地铁列车期望轨迹控制目标是寻找合适的控制输入uf(k,i),使得跟踪误差e(k + 1,i)= vd(k + 1)− v(k + 1,i)在收敛次数i 趋于无穷时收敛为0.
将CFDL数据模型改写为
(6)
考虑地铁列车控制输入准则函数如下:
(7)
其中λ>0是权重因子,用来限制不同迭代次数之间控制输入量的变化.
根据优化条件,可得
(8)
其中ρ ∈(0,1]是步长因子,它的引入是为了使算法(8)更具一般性和灵活性.
设计ϕc(k,i)的估计准则函数如下:
(9)
其中µ >0是一个权重因子.
根据优化条件,得到ϕc(k,i)的迭代更新算法如下:
(10)
其中步长因子η ∈(0,1]可以使控制更灵活.
结合式(8)(10),基于紧格式动态线性化的无模型自适应迭代学习控制算法(compact format dynamic linearization-MFAILC,CFDL-MFAILC)设计为
(11)
(12)
(13)
其中:是ϕc(k,i)的估计值,是初次迭代时的取值,ε是一个小的正数.
在地铁列车运行过程中,由于运行环境复杂、不确定性、扰动以及紧急情况等因素的影响,可能导致列车每次的运行时间都随机变化. 但现有方案都假设其运行时间区间固定不变,即地铁列车严格重复工作,这就导致上述MFAILC算法(11)–(13)不能应用.
3 地铁列车运行时间区间迭代变化的MFAILC算法设计
设随机变量Ti是地铁列车第i次迭代的实际运行时间长度,设Tmax是地铁列车超出期望运行时间Td的最大运行时间长度. 列车实际运行时间长度Ti可能小于或大于期望的运行时间长度Td. 当时,即系统数据在时间区间]内丢失,不能用于控制输入更新; 当时,即系统数据在时间区间内,Ti超出了期望运行时间长度,故内的数据是冗余的,冗余的系统数据被丢弃,其对控制输入更新是无用的; 当时,可以认为是正常的学习控制过程,因为控制系统使用了完整的期望运行时间长度. 为简单起见,在本文中只考虑的情况 [22] .
用Tmin表示列车最小运行时间长度. 因此,在第i 次迭代时,时间区间[Tmin,Ti ]上的系统数据可用,时间区间[Ti + 1,Td]上的系统数据不可用. 为了描述迭代时间长度的随机性,给出如下定义. 设γ(k,i),k∈ [0,Td]为第i次迭代的随机变量,取二进制值0和1满足伯努利分布. 事件γ(k,i)= 1表示学习过程可以运行到时间瞬间k的概率为p(k),其中0 <p(k)<1是时间函数. 事件γ(k,i)= 0表示学习过程不能运行到时间瞬间k,其发生的概率为1−p(k).
假设 3 假设Ti是一个随机变量,. 这意味着的概率是pl,其中l ∈ {1,· · ·,Td − Tmin}且为已知常数.
注 3 假设3给出了迭代运行时间长度的描述,假设不同迭代中每次到达终点时间的概率是已知的,这个假设在文献 [23] 中也适用.
当k ∈ [0,Tmin]时,γ(k,i)= 1,p(k)= 1.设Hl是学习过程在时间瞬间k=Tmin+l结束的事件,其中l∈ {1,· · ·,Td − Tmin}. 由假设3,可以得到P[Hl]=pl . 因此,当成立时,对于k∈ [Tmin,Td]时的γ(k,i)= 1概率由事件Hl决定.
可以得出结论
进一步得出
显然,此外,由于γ(k,i)满足伯努利分布,可以计算γ(k,i)的期望如下:
现在,定义一个改进的跟踪误差为
因为γ(k,i)满足伯努利分布,故得
同理,定义一个改进后的PPD更新项为
根据上述定义,构造改进的CFDL-MFAILC(improve CFDL-MFAILC,iCFDL-MFAILC)算法如下:
(14)
(15)
假设 4 对于任意k ∈ [0,Td]且i = 1,2,· · ·;
成立,其中是一个任意小的正常数.
注 4 从假设4可以看出,系统输出不会随着控制输入的增加而减少,可以将其看作类线性特性,即控制方向的符号是已知的,或者至少是不变的. 这一假设对于许多实际系统是合理的.
定理 1 考虑满足假设1–4的迭代运行时间长度随机变化的非线性系统(4). 如果采用iCFDL-MFAILC 方案(13)–(15),则存在λmin >0,使得当λ>λmin时跟踪误差e(k,i)的数学期望在i→∞时收敛于0.
证明过程可参考文献 [22] .
注 5 由定理1的证明,可以发现在收敛分析过程中不需要相同的初始条件. 因此,该设计可以放宽ILC系统初始条件需要严格相同的基本假设. 文献 [23] 所提的ILC设计需要每次迭代运行时间长度概率分布的先验信息,但本文的收敛条件与概率分布函数p(k)无关,因此iCFDL-MFAILC算法设计不需要概率分布的先验信息,更适合实际应用.
4 仿真分析
为验证所提iCFDL-MFAILC算法的有效性,本文基于CRH2-A型列车系统进行了仿真. 列车为完成客运任务,重复跟踪150次,即i= 150. 设采样时间Ts = 0.1 s,列车质量M = 350 000 kg,Td = 2000 s. 若列车严格运行在固定的时间间隔[0,2000]内,则期望速度 vd轨迹如图2所示 [17],附加阻力fa如图4中实线所示. 其中
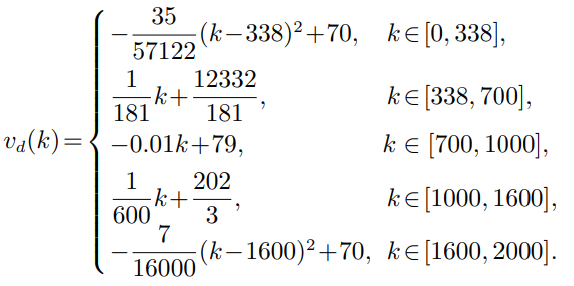
(16)
基本阻力系数b0,b1,b2满足如下:
(17)

图2期望速度轨迹
Fig.2Desired speed trajectory
不失一般性,设表1列出了其他控制器参数.
表1参数设置
Table1Train simulation parameter

为了便于本文描述列车运行时间区间随机变化,设Td−Tmin = 100. 本文考虑的最大迭代运行时间长度,即期望迭代运行时间长度为Td = 2000 s,迭代变化运行时间长度满足Ti∈[1900,2000],如图3所示. 故P[Ti = Tmin + l]= 1/100,l ∈ [1,· · ·,100]. 因列车实际运行时间长度在时间间隔[1900,2000]内随机变化,列车动力学中的附加阻力fa会随每次运行而变化. 为演示iCFDL-MFAILC算法的有效性,图4中绘制了期望运行时间长度、第60次和第120次迭代时的fa值. 从图4中可以看出随着每次迭代运行时间长度的变化,列车的附加阻力fa也会相应变化.

图3每次迭代的运行时间长度
Fig.3The length of running time for each iteration

图4列车单位质量上的附加阻力
Fig.4Additional resistance to the mass of the train unit
此外,为了演示所提iCFDL-MFAILC算法的控制性能,与改进型PD型ILC算法进行仿真比较. 改进型 PD型ILC算法设计为 [24]
(18)
其中
改进型PD型ILC算法和本文所提iCFDL-MFAILC 算法同理,只考虑的情况. 由于第i次迭代时列车实际运行时间长度为Ti ,在[Ti+1,Td]上的误差为0,故uf(k,i)=uf(k,i−1),实现了列车运行时间长度随机变化.
两种方法仿真比较结果如图5–7所示. 其中,对于 MFAC中通用的控制参数λ,ρ, µ,ε等对算法跟踪性能的影响在文献 [5] 中有具体论述. 一般来讲,闭环响应速度和超调量受权重因子λ影响. λ越小,系统的响应速度越快但其超调值会增大; 相反,系统响应速度变慢、超调量变小. λ = 0时在多数情况下系统会产生震荡甚至失稳. 其他参数选取原则参见文献 [5] .
为进一步说明跟踪性能,两种算法在第50次和第100次迭代时的速度跟踪曲线如图5–6所示. 从仿真图中可以看出,第100次迭代比第50 次迭代的跟踪效果更好,即随着迭代次数的增加,列车系统的速度跟踪效果一次比一次好. 进一步,本文所提出的iCFDLMFAILC算法与改进型PD型ILC算法相比,能够在更少的迭代次数时取得更好的速度跟踪性能.
定义如下数量指标均方误差(mean squared error,MSE),刻画每次迭代的速度误差均方差,用于评估在整个实际运行时间区间上的控制性能. 本文所提iCFDL-MFAILC算法和改进型 PD型ILC算法的速度误差均方差仿真如图7所示. 从图中可以看出,本文方法相比于改进型PD型ILC算法具有更好的跟踪效果.

图5所提iCFDL-MFAILC速度跟踪曲线
Fig.5Speed tracking profile of the proposed iCFDL-MFAILC

图6改进型PD-type ILC速度跟踪曲线
Fig.6Speed tracking profile of the improved PD-type ILC

图7速度误差均方差
Fig.7Mean square error of speed error
5 结论
本文针对迭代运行时间区间随机变化的重复非线性地铁列车系统,提出了一种新的迭代运行时间区间随机变化的iCFDL-MFAILC算法. 该方法是一种基于数据驱动的控制方法,仅利用列车运行的I/O数据来实现,不需要列车系统的任何模型信息. 严谨理论分析表明,跟踪误差的数学期望随着迭代次数的增加可证渐近收敛. 应用CRH2-A型列车系统模型的仿真结果进一步验证了所提控制算法的可用性和有效性.