摘要
针对含有匹配扰动的双馈风机功率跟踪控制问题, 本文提出了一种基于新型自适应预设时间趋近律的最优滑模控制方法. 首先, 根据线性最优反馈控制理论设计了最优积分滑模面, 有效地改善闭环系统在滑模运动阶段的动态响应特性; 然后, 本文设计了一种参数更少, 结构更简单的自适应预设时间趋近律, 利用正弦函数的周期性实现了滑模面的预设时间到达, 并提升了滑模面到达时间对滑模面初值的鲁棒性; 最后, 将所提方法推广至二阶滑模情形, 通过对符号函数进行积分, 消除了控制器中的抖振现象, 并通过大量的仿真案例验证了所提结论的正确性和有效性.
Abstract
To handle the power tracking control problem of doubly fed wind turbines with matched disturbances, the optimal sliding mode control method based on a novel adaptive predefined-time reaching law is proposed in this paper. Firstly, according to the linear optimal feedback control theory, an optimal integral sliding mode surface is designed, which effectively improves the dynamic response characteristics of the closed-loop system during the sliding mode phase. Then, by using the periodicity of a sine function, an adaptive predefined-time reaching law with fewer parameters and simpler structure is designed, which could guarantee the predefined-time arrival to the sliding surface and improve the robustness of the arrival time to initial values. Finally, the proposed methods are extended to the second-order sliding mode case which could eliminate the chattering phenomenon in the controller by integrating the sign function, and the correctness and effectiveness of the proposed results are verified by numerous simulation examples.
1 引言
风能作为可再生能源的重要组成部分,凭借其显著的环境友好性、部署灵活性、经济性以及近似无限的储量特性,受到了世界各国的青睐与投资 [1] . 在我国,风力发电行业发展迅速 [2],是继火电和水电之后的第三大发电类型. 风力发电技术的核心在于风力发电机的控制,研究风力机组功率跟踪控制可以实现风能的高效利用,提高发电总量,保障设备安全. 双馈感应发电机凭借其成本低、效率高、功率调节灵活等优势被广泛应用于风力发电之中. 然而,风能资源固有的间歇性和波动性,以及双馈风机自身的不确定性和强耦合性都给其功率跟踪控制带来了巨大的挑战.
在以往的工作中,针对双馈风机已经形成了诸多成熟的控制策略,包括反馈线性化 [3]、滑模控制 [4-5]、反步法 [6]、自适应控制 [7] 等. 其中,滑模控制因其形式简单、易于实现、动态响应速度快、鲁棒性能强等优势脱颖而出. 滑模控制的核心在于滑模面和趋近律的设计. 在滑模面设计方面,文献 [8] 采用积分滑模和扩张状态观测器相结合的方法,来提高双馈风机的低电压穿越能力,取得了较为良好的控制效果,但其积分滑模面的参数未经优化设计,系统的动态响应特性较差. 因此,如何设计合适的滑模面,保障滑模运动模态下闭环系统的最优性需要进一步讨论.
传统滑模趋近律大都采用符号函数进行设计,可以保证滑模面在有限时间内收敛,然而趋近律中的符号函数会导致控制器出现抖振现象. 通过使用饱和函数 [9] 替换符号函数或高阶滑模 [10] 等方法可以有效抑制抖振现象. 但有限时间趋近律作用下的滑模面收敛时间依赖于滑模面初值,初值越大收敛时间也就越长. 因此,学者们开始将目光投向于固定时间趋近律的研究,以求提高滑模面收敛时间对初值的鲁棒性能. 文献 [11] 提出了一种新型固定时间非奇异终端滑模控制方法,不仅加速了系统的收敛速度,而且以更低的能量损耗获得了更好的控制性能,但是其设计的固定时间趋近律中含参量较多,结构相对复杂.
针对上述问题,本文提出了一种基于自适应预设时间趋近律的最优滑模控制方法,用于含匹配扰动的双馈风机系统功率跟踪控制. 主要贡献总结如下: 1)基于最优反馈理论设计了最优积分滑模面,有效地改善了双馈风机功率跟踪的动态响应特性; 2)提出了一种新型自适应预设时间滑模趋近律,可以保证滑模面在预设时间内到达,相比于现有的固定时间趋近律,所提趋近律参数更少、结构更加简单、对初值的鲁棒性能更好; 3)设计了二阶最优滑模控制器,通过对滑模趋近律中的符号函数项进行积分,有效地消除了滑模控制器中抖振现象.
2 双馈风机最优复合反馈控制
2.1 双馈风机的数学模型
为了更加精确地描述双馈风机的动态行为,在忽略定子电磁瞬变效应的情况下,本文选用式(1)所示的双馈风机三阶模型.
(1)
式中: H为双馈风机的惯性常数; sω为转子转差率; Ps =−Edids−Eqiqs为双馈风机输入的机械功率; ids,iqs分别为d轴和q轴的定子电流; ωs表示同步角速度; Ed,Eq分别为瞬态电抗下的 d 轴和 q 轴的电压; Udr,Uqr为控制输入; ,其中Lrr为转子电感,Rr 为转子电阻; Xs = ωsLss为定子电抗,其中Lss为定子自感; 为定子的瞬态电抗,其中 Lm为定转子的互感.
针对系统(1),本文的控制目标是让双馈风机的输出功率Ps能够跟踪上给定的机械功率Pm. 为了将系统(1)的功率跟踪问题转化为闭环系统的镇定问题,本文引入如下状态变换:
(2)
经过上述坐标变换之后,双馈风机系统(1)转换为式(3)所示的系统模型,即
(3)
式中: x = [x1 x2 x3] T ∈ 为系统的内部状态,此时功率输出Ps = Pm − x2iqs − x3ids. 当系统(3)中状态渐近收敛到零时,双馈风机的功率输出将完全跟踪上给定的机械功率,从而系统(1)的功率跟踪问题转化为系统(3)的闭环镇定问题.
2.2 最优复合反馈控制器设计
针对变换后的双馈风机系统(3),首先设计了如下前馈补偿与状态反馈相结合的复合反馈控制律:
(4)
式中:表示前馈控制律,用于抵消系统(3)中的非线性项; v =是待设计的反馈控制律,其中C =是待设计的反馈增益矩阵.
将式(4)所述的复合反馈控制律代入到系统(3)中,可以得到式(5)所示的双馈风机线性系统模型,即
(5)
式中:
针对线性系统(5),选取如下积分二次型性能指标:
(6)
式中: Q,R ∈ 均为对阵正定矩阵,根据线性二次型调节器(linear quadratic regulator,LQR)最优反馈控制策略,可得如下最优反馈控制律:
(7)
式中:为最优反馈增益矩阵; 是正定对称矩阵,并满足下列黎卡提方程:
(8)
结合前馈控制律K,可得最优复合反馈控制律为
(9)
定理 1 采用式(9)所描述的最优复合反馈控制时,闭环系统(3)的所有状态将全局渐近收敛到原点.
证根据LQR最优控制理论,定理1显然成立.
证毕.
注 1 本小节设计的最优复合反馈控制律给出了期望的最优闭环系统,可以服务于后续滑模面的设计,保障系统在到达滑模面后运行在最优状态.
3 最优积分滑模控制器设计
3.1 含匹配扰动的双馈风机系统模型
风机系统(3)在实际运行中会存在未知的扰动,常见的有周期性谐波扰动,因此在系统(3)的基础上,考虑如下含匹配扰动的双馈风机模型:
(10)
式中∆1,∆2为匹配扰动.
注 2 考虑到滑模控制器能够有效处理匹配扰动,因此本文主要考虑匹配扰动情形,即扰动出现在控制量的通道上. 针对非匹配扰动,一方面可以通过设计扰动观测器进行补偿; 另一方面可以通过对扰动进行集总,转换成匹配扰动进行控制.
3.2 最优积分滑模面设计
在滑模控制中,系统在到达滑模面后,将完全按照期望的闭环系统运行. 因此为了改善系统的动态响应品质,将上文的最优闭环反馈系统作为期望的滑动模态,可以设计如下基于最优复合反馈控制的最优积分滑模面:
(11)
式中:
定理 2 采用最优积分滑模面(11),当闭环系统(10)到达该滑模面后,系统的所有状态将全局渐近收敛到原点.
证对滑模面(11)求导,可得
(12)
当系统到达滑模面时,根据 = 0可得系统状态方程如下式所示:
(13)
系统(13)的渐近稳定性已在定理1中证明. 证毕.
3.3 自适应预设时间趋近律设计
符号说明: 为简化表达,记x[a] = |x| a sgn x,其中 sgn(·)表示符号函数.
为加快系统的滑模收敛速率,保证系统在预设时间内到达最优积分滑模面(11),本文设计了如下的新型自适应预设时间滑模趋近律:
(14)
式中: 参数T >0为预设的收敛时间上限; 0 <α <1; θ为自适应增益,并且满足θ(0)= 0,用来取代传统滑模趋近律中的固定增益,以实现预设时间收敛,提高系统对于滑模初值的鲁棒性.
在传统的滑模趋近律设计中,当符号函数的增益大于扰动上界时才能保证滑模面的可达性,因此在实际使用趋近律(14)时,需要额外引入大于扰动上界的固定增益,具体如下式所示:
(15)
式中: m >0大于匹配扰动的幅值. 在趋近律中引入 −m sgn s这一项,保证了在扰动存在时滑模面的可达性,而自适应增益项则是保证了滑模面可在预设时间内到达.
注 3 与论文献 [12] 中所提的双幂次固定时间趋近律相比,本文所提的自适应预设时间趋近律,需要调整的参数更少,收敛时间的上界可以直接调节,更加方便高效,同时后续仿真结果表明所提趋近律对不同初始条件具有更好的鲁棒性.
采用自适应预设时间趋近律(15),结合最优滑模面(11),可以得到如下滑模控制器:
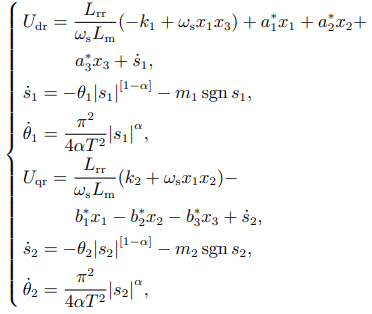
(16)
式中: θ1,θ2为自适应增益,满足θ1(0)= θ2(0)= 0.
定理 3 当匹配扰动有界时,即存在正数m1, m2 满足|∆1| ≤ m1,|∆2| ≤ m2,采用滑模控制器(16),闭环系统(10)能够在预设时间T内到达并维持在积分滑模面(11)上.
证选取如下李雅普诺夫函数:
(17)
对V1求导并将滑模面导数(12)和滑模控制器(16)代入可得
(18)
令Θ = θ1 + θ2,可得
(19)
通过引入m(t)>0,可得
(20)
通过拉式变换,可以解得
(21)
式中: sL为拉氏变换算子, V1(0)为V1的初值.
对式(21)进行拉氏反变换,最终可以解得
(22)
不难看出V1将在t = T内收敛到原点,同时由于负定,因此V1将维持在原点,进而可得滑模面在预设时间内收敛到原点. 证毕.
4 二阶滑模控制器设计
本节将进一步设计二阶最优滑模控制器,通过对趋近律中的符号函数项进行积分,来消除抖振的影响.
4.1 二阶最优滑模面设计
基于最优复合反馈控制律(9),针对系统(10)可以设计如下二阶最优滑模面:
(23)
定理 4 采用本文设计的二阶最优滑模面(23),当系统到达滑模面后,闭环系统(10)的所有状态将全局渐近收敛到原点.
证当系统稳定在二阶最优滑模面(23)时, = = 0,则有
(24)
此时,系统的各个状态量都会到达期望的滑模状态,即到达最优滑模面. 参考定理 2的证明过程,式(10)所描述的带匹配扰动的双馈风机系统在到达二阶最优滑模面(23)后将会渐近收敛到原点. 证毕.
4.2 基于预设时间趋近律的二阶滑模控制器设计
针对二阶最优滑模面(23),本文设计的基于预设时间趋近律的二阶最优滑模控制器如下式所示:
(25)
式中: ,为预设时间趋近律; θ3,θ4为自适应增益满足θ3(0)= θ4(0)= 0.
定理 5 当匹配扰动的导数有界时,即存在正数 m3,m4满足,采用二阶滑模控制器(25),闭环系统(10)能够在预设时间T内到达并维持在二阶最优滑模面(23)上.
证 选取李雅普诺夫函数为
(26)
类似定理3的证明可以得到闭环系统将在预设时间 T内收敛到二阶最优滑模(23)面上. 证毕.
注 4 在二阶滑模控制器(25)中,符号函数项出现在控制量的导数中,相当于对符号函数进行了积分,从而消除了抖振问题.
5 仿真验证
为验证所提控制器的有效性,本节将通过MATLAB/Simulink平台进行仿真验证. 双馈风机参数选取如下: H(s)= 6,Pm(kW)= 10,Lss(p.u.)= 0.18,Lrr(p.u.)= 3.16,Lm(p.u.)= 3,ωs(p.u.)= 3.14,RS(p.u.)= 0.023,Rr(p.u.)= 0.085,iqs(A)= 1.8, ids(A)= 1.7.
5.1 最优复合反馈控制验证
首先,考虑不含匹配扰动的情形,验证最优复合反馈控制器的有效性. 根据式(6)定义的性能指标,取 Q = R = I,可以得到系统的最优反馈增益矩阵同时,随机选取未优化的反馈增益矩阵作为对照实验. 两种反馈增益在不同功率点(分别选取了 5 kW,10 kW,20 kW和40 kW)下的有功功率输出曲线对比如图1所示.
根据图1的仿真结果可知,两种反馈增益矩阵都可以使双馈风机系统有功功率输出达到稳定,但采用本文设计的最优复合反馈控制后,系统可以收获更快的响应速度以及更小的系统超调量,双馈风机系统功率跟踪获得了更好的动态特性.
5.2 自适应预设时间滑模趋近律性能验证
本案例将通过对比实验验证所提预设时间趋近律的有效性和优越性,选取的对比趋近律为文献 [12] 提出的双幂次固定时间趋近律,其表达式为 =,其中: k1 >0,k2 >0,0 <α1 <1,α2 >1. 在仿真时选取参数k1 = k2 = 1,α1 = 1.5,α2 = 0.5,并估计出其收敛时间上界为4(s). 本文所设计的自适应预设时间滑模趋近律在仿真时选取参数 α = 0.5,T = π(s). 面对不同的滑模面初值s(0),两种趋近律作用下的滑模面收敛曲线分别如图2(a)和图2(b)所示.

图1不同功率跟踪点的功率输出曲线
Fig.1Power output curves for different power tracking points

图2不同初值下的滑模面收敛曲线
Fig.2Sliding mode surfaces convergence curves for different initial values
根据对比可知,两种滑模趋近律均可以实现固定时间收敛,且均小于预估的收敛时间上限. 本文设计的自适应预设时间趋近律在选取不同的滑模面初值时,滑模面收敛时间基本一致,且收敛时间等于预设的收敛时间上界,对滑模初值表现出了强的鲁棒性. 而文献 [12] 中的趋近律在面对不同的滑模初值时,虽然敛时间均小于其收敛时间上界,但收敛时间差异性较大. 除此之外,本文所设计的趋近律收敛时间上界只由参数T决定,相较于双幂次趋近律参数更少,结构更加简单,参数选取更加简便.
5.3 基于预设时间趋近律的最优滑模控制器验证
本文考虑双馈风机系统中含有三角谐波形式的匹配干扰: ∆1 = 0.1 sin(2t)+ sin(0.5t),∆2 = 0.1 × cos(2t)+ cos(0.5t),控制器(16)和(25)中的参数选取如下: m1 = m2 = 0.2,m3 = m4 = 0.25,α = 0.5,T = π. 在控制器(16)的作用下,最优积分滑模面(11)的收敛曲线如图3(a)所示,其对应的一阶控制器输出由图3(b)给出; 在控制器(25)的作用下,二阶最优滑模面(23)的收敛曲线如图3(c)所示,此时的二阶控制器输出则由图3(d)给出.


图3滑模面收敛曲线及相应控制器输出曲线
Fig.3Convergence curves of sliding mode surfaces and corresponding controllers output curves
由图3可知,当采用本文所设计的预设时间趋近律时,无论是最优积分滑模控制器(16)还是二阶最优滑模控制器(25),其对应的滑模面均可以在预设时间 T = π(s)内收到零. 采用控制器(16)的系统在到达滑模面后,系统控制量便会剧烈抖振,而采用控制器(25)的系统在到达滑模面后,系统控制量输出曲线更加平滑,有效解决了滑模控制的抖振问题. 图4展示了两种滑模控制器作用下的功率输出曲线,可以发现两者都可以使得闭环系统稳定,有着良好的跟踪效果.

图4不同控制器下的功率输出曲线
Fig.4Power output curves under different controllers
6 总结
本文针对含匹配扰动的双馈风机系统,设计了基于自适应预设时间滑模趋近律的最优滑模控制器. 首先,基于最优反馈理论,设计了最优积分滑模面,实现了双馈风机系统对于期望输出功率的最优跟踪,优化了闭环系统的动态响应特性. 接着,设计了自适应预设时间滑模趋近律,保证了滑模面在预设时间内的可达性. 最后,把滑模控制器推广至二阶情形,通过对趋近律中的符号函数项进行积分,消除了滑模控制器抖振问题. 未来将进一步考虑设计预设时间扰动观测器,解决含非匹配扰动的双馈风机功率跟踪控制问题.