摘要
针对受到多源干扰影响的切换T-S模糊系统, 本文提出了一种自适应抗干扰切换控制策略. 多源干扰包括可测未建模干扰与不可测量的神经网络建模干扰两部分. 首先, 针对平均驻留时间依赖的切换T-S模糊系统设计了一种自适应扰动观测器用于近似动态神经网络建模扰动; 其次, 基于观测器设计了自适应抗干扰控制器. 利用L2增益性能指标分析了从输出到扰动的衰减性能; 然后, 在平均驻留时间依赖的切换信号下, 给出了切换T-S模糊系统的自适应抗干扰切换控制问题可解性的充分条件. 最后, 通过一个质量–弹簧–阻尼仿真例子验证了所建立自适应抗干扰切换控制方案的有效性.
Abstract
In this paper, an adaptive anti-disturbance switched control strategy is proposed for switched T-S fuzzy systems subject to multiple sources of disturbance. The multi-source disturbances encompass two components: measurable but unmodeled disturbances and unobservable disturbances modeled by neural networks. Firstly, an adaptive disturbance observer is devised for approximating dynamic neural network modeled disturbances, specifically designed for switched TS fuzzy systems under the constraint of an average dwell time switching signal. Subsequently, an adaptive anti-disturbance controller is formulated based on the observer. The attenuation performance from the output to the available disturbances is analyzed using the L2 gain performance index. Furthermore, under the constraint of the average dwell time-dependent switching signals, the sufficient conditions for the solvability of the fuzzy adaptive anti-disturbance switching control method are provided. Finally, the rationality and effectiveness of the established adaptive anti-disturbance switched control scheme are validated through a simulation example of a mass-spring-damper system.
1 引言
作为一种典型的混杂系统,切换系统因其能够描述大量实际复杂过程并提供相对简单的非线性控制设计方法而备受青睐. 一个切换系统是由一个切换信号与一组子系统构成 [1] . 切换系统已经成为自动控制领域的研究热点 [2-3] . 由于切换规则在切换系统中的重要作用,许多学者对其产生了浓厚兴趣 [4-7] . 到目前为止,关于不同类型的切换系统已有大量的研究成果,包括可变阶分数切换系统 [8]、网络切换系统 [7]、非线性切换系统 [9] 等.
在工程实践中,由于Takagi-Sugeno(T-S)模糊系统能够通过简单加权线性系统来表示复杂的非线性系统,因此许多成熟的线性系统理论可以用于研究复杂的非线性系统 [10] . 通常情况下,通过 T-S模糊的方法,利用IF-THEN规则,可以将非线性动态系统划分为一系列线性子系统. 许多学者已经对T-S模糊系统进行了研究并取得了一系列成果. 此外,还形成了许多有趣的控制方法,如动态事件触发安全控制 [11]、网络故障检测控制 [12]、鲁棒的静态输出反馈H∞控制 [13]、系统镇定控制 [14] . 需要指出的是,在文献 [12-14] 中,并未考虑通过 IF-THEN规则划分的线性子系统之间的相互作用,也未考虑当T-S模糊系统具有大量IF-THEN规则时无法找到可行的公共矩阵的情况 [15] . 因此,具有切换系统和T-S模糊系统优势的切换T-S模糊系统受到了广泛关注并取得了一些结果. 例如,异步滤波控制 [16]、耗散性滤波控制 [17]、事件触发控制问题 [18] 和非脆弱量化H∞滤波控制 [19] . 但是多数结果都没有考虑多源扰动抑制. 因此,研究切换T-S模糊系统的多源扰动抑制问题是有必要的.
在实际工业过程和控制工程中,控制系统通常会受到各种扰动的影响,这些扰动可能严重降低系统性能甚至导致系统不稳定. 由于受到生产水平和成本的限制,很难改变系统的设备结构以减少扰动对系统的影响. 幸运的是,一些扰动抑制技术已经得到了发展,例如H∞控制策略 [20]、基于模型的抗干扰控制方案 [21] 和滑模技术 [22-23] . 基于扰动模型的自适应控制方法是一种吸引人的控制策略,与其他抗干扰控制方法相比,基于扰动模型的抗干扰控制技术因为结构简单,控制精度高以及易于与其他控制策略组合的优势 [24-25] 而在控制工程中得到了广泛应用. 例如切换系统 [26]、LPV系统 [27]、T-S模糊系统 [28] . 不幸的是,大多数基于扰动模型的抗干扰方法只能处理谐波或常量扰动 [29] . 因此,如何描述并消除或减小不规则非线性扰动的影响,尤其是那些事先未知的扰动(例如,衰减的谐波扰动、锯齿波扰动),是一个有意义的研究课题. 神经网络是识别复杂非线性系统的强大工具,这是由于它们的即时适用性,固有的逼近能力和并行性 [30-31] . 在工程实践中,动态神经网络已经被成功地应用于控制系统,它可以通过测量数据捕捉系统动态 [32-33] . 因此,这些动态神经网络的优越性能启发研究人员使用动态神经网络来逼近未知的外部扰动 [34] .
针对一类切换T-S模糊系统,本文基于多Lyapunov 函数方法提出了一种自适应抗干扰控制问题的一个解决方案. 与已有的文献相比,本文主要具有以下3个方面的贡献:
2)本文研究了受多源扰动影响的切换T-S模糊系统(包括可用的未建模扰动和不可用的动态神经网络建模扰动). 与文献 [5,17,35-36] 中受单一扰动影响的切换T-S模糊系统不同,本文考虑的系统与实际情形更吻合. 通过设计自适应扰动观测器估计了神经网络建模扰动. 利用H∞控制方法抑制了不可建模扰动;
3)针对切换T-S模糊系统提出了一种自适应抗干扰切换控制方案. 在平均驻留时间依赖的切换信号下,设计了自适应扰动观测器和控制器,建立了切换T-S 模糊系统自适应抗干扰切换控制问题的可解性充分条件.
符号表示: 本文符号如表1所示.
表1符号表示
Table1Symbol representation

2 问题描述
2.1 系统描述
考虑下面的切换T-S模糊系统:
IF属于属于THEN
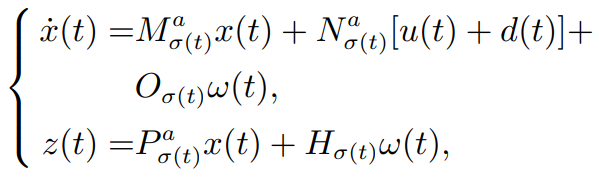
(1)
式中: σ(t)表示切换信号,σ = i∈S+ = {1,2,3,· · ·,s},s 代表着子系统个数; 表示前提变量; 为模糊集; b 表示IF-THEN 规则的数量,代表系统状态; 表示系统的控制输入; 为控制输出; 为系统受到的有模型扰动,d(t)由下面的神经网络扰动模型表征:
(2)
式中:表示神经网络系统的状态; 为神经网络激活函数; G∗为最优的权值矩阵,它表示神经网络神经元之间最优的权值关系. 模型中的矩阵E,F是已知的. 实际工程中它们是通过系统辨识和拟合法在外系统平衡点附近求得.
注 1 扰动d(t)为神经网络建模扰动,在航空发动机系统中它表示模型误差、温度变化、参数性能退化、压力突然改变等. ω(t)为外部扰动,它来源于系统的不确定性或者系统所处环境带来的扰动.
利用IF-THEN规则,可以推出下面的全局切换T-S 模糊系统:
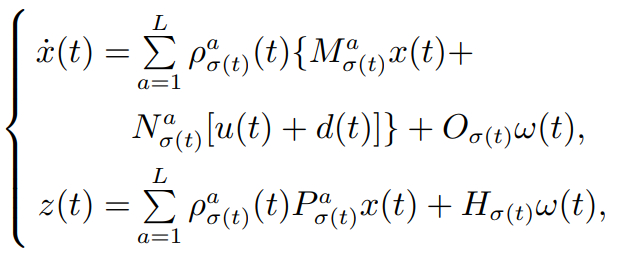
(3)
式中:
其中表示中的隶属度函数因此,
2.2 观测器设计
为估计不可测扰动d(t),设计下面的自适应扰动观测器:
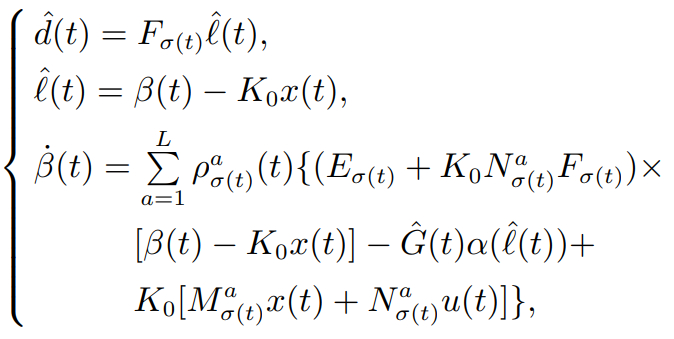
(4)
式中:表示d(t)的估计值,表示外部神经网络模型的观测值,β(t)表示观测器的状态,K0表示待设计的观测器增益,表示动态可调矩阵.
注 2 每个子观测器的增益既可以相同的,也可以是不同的. 所有子观测器选择相同的观测器增益更具有挑战性,因为这种情况下所有子观测器都借助相同的增益来观测不同的扰动. 因此,本文考虑的扰动观测器选择了相同的增益.
定义估计误差
(5)
联立式(2)(4)–(5),可以推出

因此,可以得到如下的估计误差动态:
(6)
2.3 控制器设计
选择和系统(1)相同的模糊规则,设计模糊控制器
式中为待设计的控制器增益.
相应地,不难得到如下控制器全局模型:
(7)
将控制器(7)带入系统(3)中,可得闭环系统
(8)
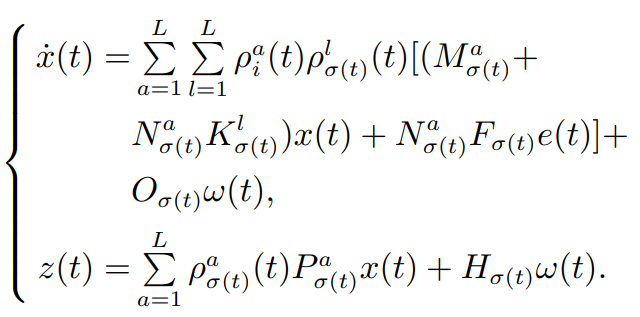
联立式(6)和式(8),可以得到扩维系统
(9)
式中:
2.4 控制目标
本文控制目标如下:
针对受到多源干扰影响的切换T-S模糊系统(1),如果存在干扰观测器(4)与控制器(7),使得以下关系式成立:
1)当ω(t)≡ 0时,扩维系统(9)是实际稳定的;
2)当时,扩维系统(9)的输出z(t)满足
(10)
式中: γ >0为L2增益系数,常数ϖ >0. 则称切换TS模糊系统(3)的自适应抗干扰控制问题是可解的.
在主要结果之前,给出以下定义与假设.
定义 1 [37] 对于切换信号σ(t),若在任意时间t >τ >0,Hσ(τ,t)满足下面的不等式:
(11)
则称 τd >0 为平均驻留时间,其中: H0为切换信号 σ(t)的抖振界,Hσ(τ,t)表示在时间区间(τ,t)内的切换总次数.
假设 1 神经网络激活函数α(ℓ(t))满足Lipschitz条件
式中Ue为给定的对称矩阵.
图1为自适应抗干扰切换控制策略的结构框图.

图1自适应抗干扰切换控制策略的结构图
Fig.1Configuration of the adaptive anti-disturbance switched control
3 主要结果
本节建立切换T-S模糊系统(1)的自适应抗干扰切换控制问题的可解性条件. 相应地保证系统(1)的稳定性和多源扰动抑制性能.
首先,讨论的有界性,并设计相应的自适应律.
定理 1 考虑自适应扰动观测器(4). 对于预先设定的正常数n >0,如果存在矩阵Y2 >0 满足以下条件:
(12)
那么式中
证选择Lyapunov函数
(13)
对式(13)求导数,可得
(14)
式中n1 >0为常数,激活函数的中间项表示为
易知
因此,可以推出.
注意到式(14)可以重写为
(15)
于是,若
则因此,若则且证毕.
注 3 定理1给出了自适应扰动观测器(4)中动态可调权重矩阵的自适应律. 并且证明了自适应参数的收敛性.
下面应用多Lyapunov函数分析扩维系统(9)的稳定性和L2增益性能.
定理 2 对于扩维系统(9),如果存在矩阵 Y1i >0,Y2 >0,,以及正常量常量满足以下约束:
(16)
(17)
式中:

则,在平均驻留时间依赖的切换规则
(18)
下,系统(9)的状态收敛到如下区域:
证对于第i个子系统,选取Lyapunov函数
(19)
式中:
根据式(19),可以推出
(20)
选取式(12)中的自适应率,然后对Ψ2(t)求导数,可以得到
根据定理1的结果可以推出
(21)
(22)
且
(23)
式中表示的正上界.
联立式(21)–(23)可得
(24)
由式(20)(24)可以推出
式中:
由式(13),可以得到
(25)
于是,当ω(t)= 0时,不难得到
(26)
根据式(17)可得
(27)
联立式(11)(26)–(27)和可以得到
(28)
因此,可以得出
(29)
这意味着系统(9)的状态ξ(t)可以收敛到以下区域:
式中
当
(30)
式中将式(30)两边同时乘以可以推导出
(31)
通过式(28),可以得到
(32)
将式(32)的两端从t : 0 → ∞积分,可以得到
式中:为正常数. 因此,当t→ ∞时,L2增益性质(10)成立. 证毕.
注 4 定理2通过建立充分条件解决了系统(1)的自适应抗干扰切换控制问题. 若扰动ω(t)≡ 0,则从定理2可得切换T-S模糊系统(1)是实际稳定的,若则当t → ∞时,L2增益性质(10)成立.
下面给出供控制器(7)和观测器(4)的设计过程.
定理 3 考虑系统(9). 若存在矩阵与正常量满足以下约束:
(33)
(34)
式中:

则观测器(4)和控制器(7)是系统(1)的自适应抗干扰切换控制问题的一个解决方案. 此外,控制器和观测器增益
证在不等式(16)左右两端同时乘以可以得到
(35)
式中:
定义,然后对式(35)应用Schur补引理,可得
(36)
式中
再次将式(36)采用Schur补引理可以推出式(33).
证毕.
注 5 对于具有平均驻留时间切换信号的切换系统,通常无法获得标准增益. 因此,文献 [26] 使用加权增益来方便的描述切换系统的干扰抑制水平. 由此启发,本文也采用了加权增益.
4 仿真验证
为了说明所提出的自适应抗干扰切换控制策略的合理性和有效性,本节采用一个质量– 弹簧–阻尼案例.
选择隶属度函数
(37)
在隶属度函数(37)的作用下,质量–弹簧–阻尼系统可以被表示为
(38)
给定质量–弹簧–阻尼系统(38)的参数为
考虑质量–弹簧–阻尼系统(38)受到谐波干扰的情况. 由神经网络模型建立的干扰项d(t)的参数为
常数选择如下:
控制任务为调节受到多源扰动影响的质量–弹簧–阻尼模型(38)的推力. 通过求解线性矩阵不等式(16)–(17),可以得到控制器增益、观测器增益K0 的值如下:

同时求得L2增益性能指标γ = 3.21(扰动抑制水平).
仿真结果如图2–5所示. 图2表示质点位移∆π(t)和速度∆ϖ(t). 图3反应了谐波衰减扰动d(t)及其估计的变化曲线. 图4为控制输入u(t). 图5展示了切换信号 σ(t). 由图2可以观察到位移 ∆π(t)和速度 ∆ϖ(t)是有界的. 由图3中可以看出,自适应扰动观测器可以跟踪不规则扰动d(t). 由图4可以看出,自适应抗干扰切换控制方法得到的控制输入是有界的. 因此,可以说明所提出的适应抗干扰切换控制方法是有效的.

图2质点的位移和速度
Fig.2The displacement and speed of the mass

图3扰动d(t)和它的估计值
Fig.3The disturbance d (t) and its estimation
5 结论
本文针对受不可测神经网络建模扰动和可测未建模扰动影响的切换T-S模糊系统,利用多Lyapunov函数方法研究了自适应抗干扰切换控制问题. 引入了一种新的自适应扰动观测器来观测神经网络建模的扰动. 建立了基于自适应扰动观测器的抗干扰反馈控制器. 然后,设计了自适应抗干扰切换控制方法,为解决切换T-S模糊系统的自适应抗干扰切换控制问题提供了理论条件. 当不可建模扰动不存在时,获得了切换TS模糊系统的实际稳定性条件. 当不可建模扰动存在时,获得了抑制扰动影响的L2增益性能指标. 最后,通过一个受到非线性不规则扰动影响的质量– 弹簧–阻尼系统验证了所提方法的可行性和有效性. 本文遇到的主要困难是,神经网络建模的扰动难以利用自适应扰动观测器来观测,需要大量的时间来得到最优的权值矩阵和扰动观测器增益. 作者未来将研究模型依赖的平均驻留时间切换信号约束下的自适应抗干扰切换问题.

图4弹簧的推力u(t)
Fig.4The spring pushing force u (t)

图5切换信号
Fig.5The switching signal