摘要
为提升电液伺服系统的跟踪控制性能, 本文考虑系统中包括参数不确定性、未建模动态以及外部扰动在内的集总不确定性, 提出一种基于命令滤波和神经网络的有限时间反步控制方法. 该方法利用Levant微分器作为命令滤波器, 获取虚拟输入变量与虚拟控制律差分信号的导数, 不仅避免了标准反步控制中的“复杂性爆炸”问题, 还通过重构实现了对非匹配不确定性的估计; 同时, 与传统基于神经网络的反步控制需要多个神经网络相比, 该方法仅利用1个神经网络来逼近匹配不确定性, 避免了多个神经网络所导致的控制器的复杂性和脆弱性. 另外, 通过引入由分数指数幂函数和多项式函数构成的分段函数反馈以加速收敛, 系统实现有限时间稳定的同时避免了奇点问题. 最后, 搭建实验平台开展对比实验验证新方法的有效性和优越性.
Abstract
To improve the tracking control performance of electro-hydraulic servo systems, considering the lumped uncertainties, including parameter uncertainty, unmodeled dynamics, and unknown disturbances, a finite-time backstepping control method based on command filter and neural network is proposed. A Levant differentiator is used as the command filter to obtain the derivative of the differential signal between the virtual input variable and the virtual control law, which not only avoids the “explosion of complexity” in standard backstepping control, but also estimates unmatched uncertainty through reconstruction; Compared with traditional neural network-based backstepping control that requires multiple neural networks, this method only uses one neural network to approximate the matched uncertainty, avoiding the complexity and fragility of controllers caused by multiple neural networks. By introducing piecewise feedback functions composed of a fractional exponential power function and a polynomial function to accelerate convergence, the system achieves finite time stability while avoiding singularity problems. Finally, an experimental platform is established to conduct comparative experiments, and the effectiveness and superiority of the proposed new method are verified.
1 引言
电液伺服系统以其负载能力强、功率密度高、控制精度高、响应速度快的优点,在运动控制系统中有着不可替代的地位,被广泛应用于冶金、航空航天、机器人、工程机械等领域 [1-2] . 然而,电液伺服系统中存在着复杂的非线性和不确定性问题,如伺服阀的压力–流量特性、参数不确定性、未建模动态、外部扰动等 [3] . 为有效应对上述问题,提升系统控制精度,先进的非线性技术逐渐应用于电液伺服系统.
反步法 [4]是非线性控制方法中最强大的工具之一. 标准反步控制是利用当前虚拟控制律及其导数来构造下一个虚拟控制律,最终通过最后的虚拟控制律及其导数得到实际控制律. 随着系统阶数的升高,虚拟控制律的高阶时间导数带来“复杂性爆炸”问题. 为解决该问题,文献 [5]和文献 [6]分别提出了动态面反步控制和命令滤波反步控制,这两种方法均是利用滤波器获取虚拟控制律导数的数值解,避免对虚拟控制律导数进行解析计算,极大地减少了计算量. 为应对电液伺服系统中复杂的不确定性,Yao等 [7]基于标准反步控制,提出了自适应鲁棒控制,利用自适应技术处理系统参数不确定性,利用鲁棒反馈抑制未建模动态和外部扰动等不确定性; He等 [8]和Hao等 [9]分别提出了自适应鲁棒动态面控制和自适应命令滤波控制. 然而,这些方法都需要高增益反馈来抑制系统不确定性的影响,这可能导致控制器过饱和. 因此,上述方法仅适用于不确定性较小的系统.
神经网络具有通用逼近能力,能以任意精度逼近连续函数,被广泛用于估计系统中的不确定性 [10-11] . Ge等 [12]为高阶非线性系统开发了一种自适应神经网络控制方案,使用基于径向基函数(radial basis function,RBF)的神经网络结构,同时逼近不确定性和虚拟控制律导数,Guo等 [13]将该方法应用于电液伺服系统,取得了良好的控制效果. Shen等 [14]将神经网络和命令滤波控制相结合,利用神经网络逼近不确定性,通过命令滤波器获取虚拟控制律的导数,这种精细化处理可获得更高的控制精度. 然而,对于电液伺服系统这类高阶系统(电液伺服系统通常至少采用3阶系统模型),上述基于神经网络的反步控制方法,通常需要多个神经网络,调整的参数较多,导致控制器的复杂性和脆弱性,其中有1个神经网络失效,可导致整个系统性能恶化,甚至失稳.
与渐近稳定控制方法相比,有限时间控制方法具有响应快、跟踪精度高、扰动抑制能力强等优点 [15-17] . Yu等[15] 实现了高阶非线性系统的有限时间命令滤波控制,Niu等 [16]在此基础上结合神经网络逼近不确定性,提出了基于神经网络的有限时间自适应命令滤波控制,成功应用于3级阀控电液伺服系统. 然而,文献 [15]和文献 [16]为实现系统的有限时间稳定,在虚拟控制律中引入了幂函数x r(0 < r <1)以加速收敛,此函数在x = 0处不可导,存在奇点问题. Sun等 [17]通过引入由分数指数幂函数和多项式函数构成的分段函数,来规避奇点问题. 不过,和渐进稳定的神经网络反步控制方法类似,上述有限时间稳定的神经网络反步控制方法均无法避免多个神经网络的使用.
受以上基于反步框架设计的控制方法优缺点的启发,考虑到电液伺服系统工况复杂且不确定性较大,本文提出了一种新型的基于命令滤波和神经网络的有限时间反步控制方法. 首先,根据电液伺服系统基本原理建立严格反馈形式的电液伺服系统模型. 其次,利用命令滤波器和神经网络来估计不确定性,以抵消不确定性对系统稳定性的不利影响. 与传统命令滤波控制方法不同的是,所提出控制方法不直接对虚拟控制律进行操作获取其时间导数的数值信号,而是对虚拟输入变量与虚拟控制律的差分信号进行命令滤波处理,获取该差分信号的时间导数,进而对电液伺服系统模型中的非匹配不确定进行估计,这种命令滤波器的运用方式还避免了标准反步控制中的“复杂性爆炸”问题; 同时,通过RBF神经网络来统一逼近系统模型中的匹配不确定性和最后一个虚拟控制律的时间导数. 将Levant微分器作为命令滤波器,并引入由分数指数幂函数和多项式构成的分段函数,实现了闭环系统的有限时间稳定,且无奇点问题. 最后,搭建电液伺服系统实验平台,验证了所提出控制方法的有效性和优越性.
2 电液伺服系统建模
电液伺服系统主要由液压缸、伺服阀、油源泵站、负载以及油管等辅助设备构成,如图1所示. 本文考虑执行机构为非对称式液压缸的情形,因为对称式液压缸可以看作非对称式液压缸两腔有效面积相等时的特殊情形,所以非对称式液压缸更具有一般性.

图1电液伺服系统原理示意图
Fig.1An schematic diagram of the electro-hydraulic servo system
伺服阀动力学通常比系统其余部分快得多,则有
(1)
其中: ku为伺服阀增益,u为控制信号.
设液压缸两腔的流量分别为Q1和Q2,则有
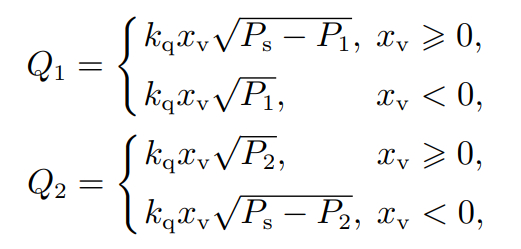
(2)
其中:为流量系数,w为伺服阀面积梯度,ρ为液压油密度.
根据流量连续性方程,可得
(3)
其中: xp为液压缸活塞位移,A1和A2分别为液压缸两腔的有效面积,P1 和P2 分别为液压缸两腔的压力,V1 = V01 + A1xp 和V2 = V02 − A2xp分别为液压缸两腔的控制容积,V01和V02分别为液压缸两腔的初始控制容积,cti为液压缸内泄漏系数,cto为液压缸的外泄漏系数,βe为有效体积模量.
根据牛顿第二定律,液压缸的动力学方程为
(4)
其中: m为负载和活塞杆的总质量,b为粘滞摩擦系数,k为弹性系数,FL为未知负载力,包括未建模摩擦力、外部扰动力以及其他未知动态.
令状态变量由式(1)–(4),系统的动力学方程可以表示为
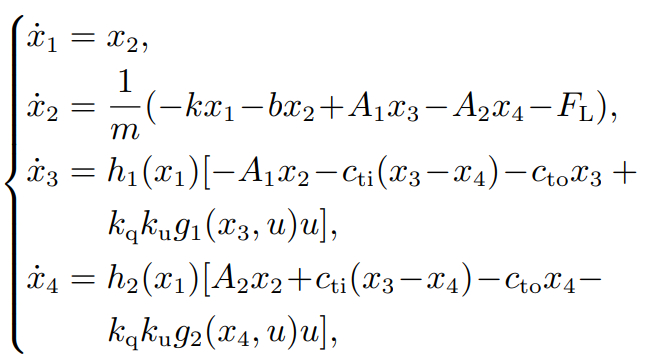
(5)
其中:
然而,模型(5)通常不直接用于电液伺服系统控制器的设计,而取等效负载压力作为新的状态变量,其中将模型(5)转化为
(6)
其中:
文献 [18]称模型(6)为严格反馈形式,但由于模型(6)中存在两个冗余状态x3和x4,这两个冗余变量不在模型(6)的状态变量中,故文献 [18]的阐述并不严谨. 从的关系来看,同一个 有无数x3和x4的组合,x3和x4状态的变化很可能引发系统的不稳定. 但事实上由于物理条件的限制,同一个有唯一的x3和x4与之对应,也意味着x3和x4可用模型(6)中的状态变量来表达,由此推理,模型(6)应当可以转化为严格反馈形式.
首先回顾采用对称式液压缸的电液伺服系统模型,此时,A1 =A2,n= 1,则其状态方程为
(7)
其中Vt = V1 + V2为总控制容积,此处忽略了活塞杆运动对活塞杆两侧控制容积的影响,并且假设
(8)
另外,模型(7)还利用了以下关系:
(9)
(10)
其中:sgn(·)为符号函数. 式(11)和(12)是 Merritt在文献 [1]中利用静态条件推导得到的对称式液压执行机构的压力流量关系.
受此启发,下面推导非对称液压缸的压力流量关系. 假设静态条件下,忽略液压缸的泄漏流量(泄漏流量通常远小于控制流量),液压缸两腔的流量为
(11)
结合式(2)可得,当当又因可得
(12)
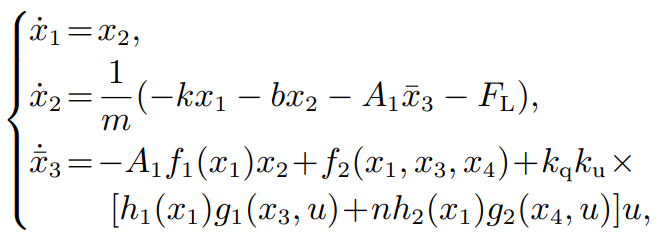
将式(12)代入到模型(6)的第3式整理可得新的电液伺服系统状态方程为
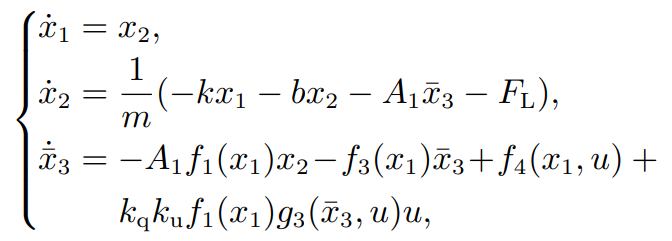
(13)
其中:f3(x1)=(1+n 2)cti(h1+nh2)+cto(h1+n3h2), f4(x1,u)=[ncto(h2−h1)+(1 − n)cti×(h1 + nh2)],
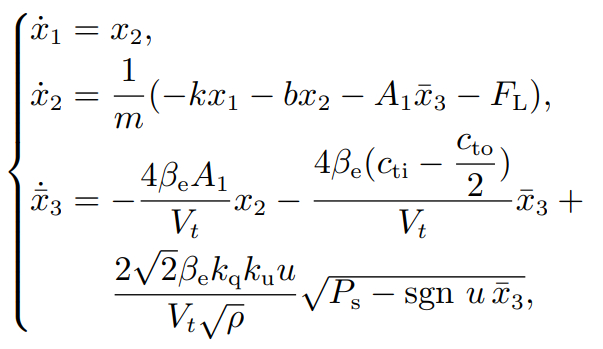
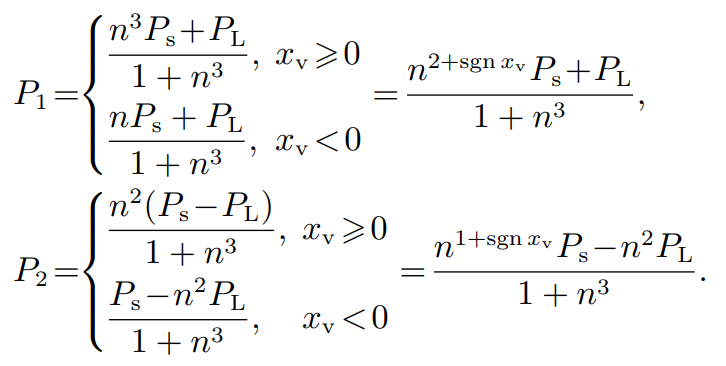
观察模型(13)第3式,定义非对称式液压缸电液伺服系统压力流量公式可得
(14)
当n= 1时,即可由式(14)得到式(10); 进一步利用式(8),模型(13)即可转化为模型(7). 因此,式(14)和模型(13)更具通用性,同时适用于非对称式和对称式液压缸电液伺服系统. 模型(13)和模型(6)并不完全等价,因为模型(13)在模型(6)的基础上,忽略了泄漏并利用了液压缸两侧静态流量条件. 不过该假设是合理的,一方面正常完好液压缸的泄漏流量通常非常小,可忽略不计; 另一方面Merritt在对称式阀控缸系统建模过程中也利用了该思想. 另外, x1和x2在模型(13)的前2 式中是典型的严格反馈形式,而通过对第3式中u分类讨论,可将sgn u从f4和g3中消除[18],使得模型(13)没有冗余的状态变量,符合严格反馈形式.
在实际中,电液伺服系统工作易发热,使得液压油温度升高,粘滞摩擦系数b、有效体积模量βe以及泄漏系数cti,cto偏离标称值. 故除了未知负载力FL引起的不确定性,电液伺服系统还存在着参数不确定性. 为此,设bn,βen,ctin和cton 分别为 b,βe,cti和cto的标称值,将系统(13)重新改写为
(15)
其中:ϕ2和ϕ3为已知函数; d2和d3为集总不确定性,包括参数不确定性、未知动态以及外部扰动等.
3 基于命令滤波和神经网络的有限时间反步控制器设计
假设 1 参考轨迹xd及其导数连续且有界.
假设 2 系统(15)中集总不确定性及其导数有界,即有界.
本节将分3步介绍系统(15)的基于命令滤波和神经网络的有限时间反步控制器设计过程.
步骤 1 令跟踪误差z1 =x1−xd,对z1求导得
(16)
令z2 =x2−α1,设李雅普诺夫函数求导
(17)
可设计虚拟控制律α1为
(18)
其中:k1 >0, κ1 >0. 函数ψ(zi)表达式如下:
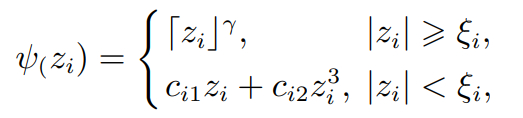
(19)
其中:1,2,3. 另外,取合适的参数γ使得ci1 + ci2 >0.
注 1 为实现有限时间控制,文献 [15]中引入了非光滑项,当时,可以加速跟踪误差zi的收敛. 但是由于反步法的每一步都需要前一步虚拟控制律的导数,而的导数存在奇点,这是由于γ−1<0,当zi = 0且时,导数无意义. 为规避奇点,本文引入非线性函数 ψ(zi),该函数由分数指数幂函数和多项式函数构成. 分数指数幂函数和zγ类似,可以在|zi |∈(0,1)时,加速zi的收敛; 多项式函数可确保ψ(zi)在zi = 0时导数存在. 另外,c1i和c2i的取值可确保ψ(zi)和其导数的连续性. 另外,可选择足够小的ξi ,来保证ψ(zi)中的⌈zi⌋ γ项在整个控制过程中发挥主要作用.
将式(18)代入式(17)可得
(20)
步骤 2 对z2求导可得
(21)
若已知,则
(22)
式(22)意味着未知非线性项可通过和已知项进行重建. 然而的解析表达式无法获得. 为此,通过以下命令滤波器来获得的估计,即
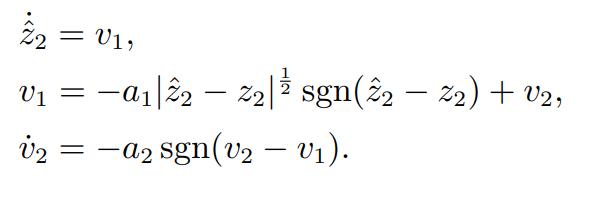
(23)
注 2 命令滤波器(23)为一阶 Levant 微分器 [19],通过选择合适的参数 a1 和 a2,在输入噪声有界的条件下,即可以在有限时间内实现,即
(24)
其中: ϱ1 >0,ϱ2 >0,取决于式(23)的参数设计.
设和的误差为
(25)
那么未知不确定性项可以表示为
(26)
令,令李雅普诺夫函数求导可得
(27)
则可设计虚拟控制律α2为
(28)
其中: k2 >0,κ2 >0. 将式(28)代入式(27)可得
(29)
步骤 3 对z3求导可得
(30)
考虑李雅普诺夫函数求导可得
(31)
则参照步骤2,不确定性可表示为
(32)
利用命令滤波器获得设z3和的误差为
(33)
那么未知不确定性可表示为
(34)
而式(34)右侧的u此时未知,将式(34)代入式(31), u被抵消掉了. 故不能采用步骤2的方法处理
为此,引入RBF神经网络来逼近,设计
(35)
其中W∗为理想权重向量,可以表示为
(36)
其中:为输入向量, W = [w1 w2 · · · wN ]为W∗的估计值,N为RBF神经网络隐含层节点数,S(X)=[s1(X)s2(X)· · · sN (X)]T为径向基函数向量,sj(X)(j = 1,2,· · ·,N)可选高斯径向基函数
(37)
其中: µj为第j个节点径向基函数的中心向量,σj为第 j个节点径向基函数的宽度. 另外ε为RBF神经网络最小逼近误差,且
将式(35)代入式(31)可得
(38)
则实际控制律u可以设计为
(39)
其中: k3 >0,κ3 >0. 将式(39)代入式(38)可得
(40)
其中为神经网路权重误差向量.
RBF神经网络的权重自适应更新率可以设计为
(41)
其中: τ >0,σW >0.
4 稳定性分析
则系统是快速实际有限时间稳定的.
引理 2 [16]有以下不等式成立:
(42)
(43)
定理 1 考虑电液伺服系统(15),在假设1和2下,通过设计命令滤波器(23),RBF神经网络(35),虚拟控制律(18)(28),实际控制律(39)和自适应律(41),选择合适的控制器参数 命令滤波器参数 a1,a2,神经网络参数 N,µj ,σj(j = 1,· · ·,N)和自适应参数τ,σW,可以实现闭环系统快速实际有限时间稳定.
证取李雅普诺夫函数求导
(44)
首先分情形讨论式(44)右端第2项.
1)当所有跟踪误差的绝对值都大于或等于
(45)
其中:
2)当部分(有m个,)跟踪误差的绝对值大于或等于
(46)
其中: 当时,分别将zi ,κi表示为当时,分别将zi,κi,ci1和ci2表示为又因所以. 根据引理2,可得
(47)
其中:表示满足的跟踪误差.
根据引理3,令可得
(48)
3)当所有跟踪误差的绝对值 |zi | 均小于 ξi ,即|zi |<ξi,i = 1,2,3,类似情形2)中的推导,可得
(49)
综上3种情形,又因可得
(50)
根据杨氏不等式可得
(51)
(52)
(53)
其中0 <Λ ≤1.
根据式(57)–(60)可得
(54)
其中:
利用引理2可得,
(55)
利用引理3,令可得
(56)
其中: r4 =r3−r1设计为正,.
由引理1,闭环系统是快速实际有限时间稳定的.
5 实验验证
为验证本文提出控制方法的有效性和优越性,搭建如图2所示的电液伺服系统实验平台,该平台参数见表1. 实验平台采用非对称式液压缸,行程500 mm,活塞直径 25 mm,活塞杆直径 16 mm; BALLUFFBTL5系列位移传感器,量程为 0∼500 mm,分辨率为 5 µm; 压力传感器型号为Wika A-10,量程0∼40 Mpa,精度为 ±0.5%; 伺服阀型号为 FF102,额定压力为 21 Mpa,额定流量为30 L/min,负载质量为20 kg,弹簧刚度为2000 N/m,测控系统的采样周期为0.5 ms.

图2实验平台
Fig.2Experimental platform
表1系统参数
Table1The system parameters

首先,设计以下4个控制方案进行对比实验. 方案1 采用本文提出的控制方法(proposed control,PC). 方案2采用文献 [16]中的基于神经网络的有限时间自适应命令滤波控制方法(finite-time neural control,FNC),与方案1的区别主要为,方案2对于系统模型(15)中的不确定性d2和d3均采用神经网络进行逼近和估计. 方案3采用渐近稳定的基于命令滤波和神经网络的反步控制方法(neural network-based control,NC),与方案1 类似,分别采用命令滤波器和神经网络估计不确定性 d2和d3,主要区别在于没有引入非线性反馈项ψ(zi),因此方案3仅实现闭环系统渐近稳定. 方案4采用传统的PID控制方法,设计了积分分离策略,避免系统初始值与设定值误差过大使得积分项过大,还利用一阶滤波器对微分项进行滤波,过滤微分带来的高频干扰.
方案 1的参数选择为 k1 = 100,k2 = 0.1,k3 = 1200,κ1 = 0.1,κ2 = 0.005,κ3 = 12,ξ1 = 0.000 02,ξ2 = 0.001,ξ3 = 0.000 1; 命令滤波器参数选择为 a1 = 8,a2 = 15; 神经网络参数选择为 N = 5,自适应参数选择为τ = diag{1000,800,500,1000,1000},σW = diag{0.001,0.001,0.001,0.001,0.001}. 方案 2和方案3中与方案1中对应的控制器参数设为相同值. 方案4的PID控制器参数设计为 KP = 1000,KI = 0.2,KD = 130,积分分离阈值为δe = 0.01,一阶滤波器时间常数为Tf = 0.01.
上述对比方案均在同一实验平台相同条件下进行,给定的参考轨迹为xd = 0.05 sin(0.4πt)+ 0.25 m. 每个控制方案的跟踪轨迹如图3所示,跟踪误差曲线如图4所示; 同时,为定量对跟踪性能进行评估,计算 5 ∼ 20 s 过程跟踪误差绝对值的最大值、平均值和标准差,如表2所示.

图3对比实验跟踪轨迹
Fig.3Control tracking curves

图4对比实验跟踪误差曲线
Fig.4Control tracking errors
表2跟踪性能指标
Table2Quantitative indicators of tracking performance

可以发现,方案1和方案2的跟踪性能指标相当,其跟踪控制误差绝对值的最大值均在5 mm以内,控制效果明显优于方案3和方案4,方案4的控制误差最大,跟踪控制性能最差. 方案1和方案2对比,说明相比于方案2采用2个神经网络逼近系统中的不确定性,本文新提出的控制方法仅需采用1个神经网络和1个命令滤波器分别逼近或估计电液伺服系统中的不确定性,可以达到和方案2相当的控制性能,且新方法减少了神经网络的利用,其控制器参数更容易调节. 方案1和方案3对比,体现了方案1中新方法的有限时间设计,有利于减小控制误差,ψ(zi)的非线性反馈有效地压制了控制误差,尤其是液压缸换向之外的控制误差明显减小. 相比于无模型补偿的方案4,其他3种方案均利用模型补偿,且跟踪控制效果明显优于方案4,说明模型补偿有助于提升电液伺服系统的跟踪控制性能.
图5给出了各个方案的控制信号曲线,可以发现在液压缸换向处,方案4出现了比较剧烈的波动,方案3 的波动较小,而方案1和方案2没有发现明显的波动,这与液压缸换向处控制误差的表现是息息相关的,换向处的控制误差越小,控制信号波动越小,液压缸换向也越平顺.


图5对比实验控制信号曲线
Fig.5Control signals of comparative experiments
图6给出了方案1和方案2对不确定性的估计情况. 方案1中,对系统(15)中的不确定性d2和d3没有进行单独估计,而是和反步法推导过程中的虚拟控制量的导数进行统一处理,即利用1个命令滤波器获得根据式(26)获得对的估计并利用1个神经网络获得对的估计W∗TS(X)(见式(40)). 方案2中,对系统(15)中的不确定性和虚拟控制律的导数进行分开处理,即利用2个命令滤波器分别获得的估计值并利用2个神经网络分别获得不确定性d2和d3的估计虽然实际电液伺服系统中难以获得不确定性d2和d3的真实大小,但从图6可以发现,方案1和方案2所估计的不确定性的大小和总体变化趋势是类似的,与不采取措施应对不确定性的方案4对比,方案1和方案2对于不确定性的估计和逼近对提升闭环系统的控制性能是有益的.

图6对比实验(方案1和方案2)不确定性估计
Fig.6Estimation of uncertainties in comparative experiments (scheme1 and 2)
为了验证所提出新方法对于较大不确定性的估计能力,下面将弹性负载看做不确定性的一部分,控制器参数与正弦跟踪对比实验保持一致,测试方案1和方案2中控制器的控制效果. 此时项被归为d2的一部分,这意味着增大了系统中的不确定性. 图7给出了弹性负载未知时方案1和方案2的跟踪控制性能. 图8给出了弹性负载未知时方案1和方案2对于系统中不确定性的估计. 从图7中可以看出,尽管系统中的不确定性增大了,但方案1仍然具有优异的跟踪控制性能,而方案2的跟踪性能显著降低. 这是因为方案2对不确定性的估计失效造成的,如图8所示,方案2对不确定性的估计发生了剧烈的波动,进而其跟踪轨迹发生波动,严重影响了闭环系统的跟踪控制性能.

图7弹性负载未知时方案1和方案2的跟踪轨迹
Fig.7Control tracking curves in scheme1 and scheme2 with unknown elastic load

图8弹性负载未知时方案1和方案2的不确定性估计
Fig.8Estimation of uncertainties in scheme1 and scheme2 with unknown elastic load
结合前文正弦跟踪对比实验来看,当系统中的不确定性较小时,方案1和方案2具有相当的优异的跟踪控制效果; 而当不确定性增大时,不改变控制器参数,方案2的跟踪性能显著降低,而方案1仍能保持着优异的跟踪控制效果. 同时,方案1的控制器结构更为简洁,需要调节的控制器参数更少,更易于在工程实践中部署. 电液伺服系统工况复杂,未知负载力引起的不确定性变化较大. 因此,方案1中本文提出的控制方法比方案2更适合电液伺服系统.
6 结论
本文针对电液伺服系统提出了一种基于命令滤波和神经网络的有限时间反步控制方法. 新方法中,命令滤波和神经网络共同承担对系统中不确定性和虚拟控制律时间导数的估计或逼近,相比于常规基于神经网络反步控制方法,只需要1个神经网络. 有限时间稳定的设计,引入了改进的分段函数,避免了奇点问题,提升了闭环系统的跟踪控制性能. 实验表明,当不确定性较小时,所提出的新方法与现有的基于神经网路的有限时间命令滤波反步控制方案相比,电液伺服系统的跟踪控制精度相当,而新方法结构更为简单,更易于工程实践,且不确定性变大后仍能保持优异的跟踪控制性能,鲁棒性较强. 同时,该控制方法可以推广到同类严格反馈形式的非线性系统中去.