
Abstract
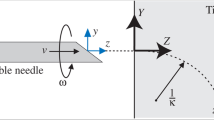
In this paper, a new bevel-tip flexible needle path planning method based on the bee-foraging learning particle swarm optimization (BFL-PSO) algorithm and the needle retraction strategy in 3D space is proposed to improve the puncture accuracy and shorten the puncture distance in the case of multiple puncture targets. First, the movement of the needle after penetrating the human body is analyzed, and the objective function which includes puncture path error, puncture path length, and collision function is established. Then, the BFL-PSO algorithm and the needle retraction strategy are analyzed. Finally, medical images of the tissue to be punctured are obtained by medical imaging instruments, i.e., magnetic resonance (MR), and the 3D model of the punctured environment is constructed by 3D Slicer to obtain the environment information on targets and obstacles, and the path of flexible needle is carried out based on the BFL-PSO optimization algorithm and the needle retraction strategy. The simulation results show that, compared with other path planning methods in the related literature, the new path planning method proposed in this paper has higher path planning accuracy, shorter puncture distance, and good adaptability to multi-target path planning problems.











Similar content being viewed by others

References
Wei, Z., Wan, G., Gardi, L., Mills, G., Downey, D., & Fenster, A. (2004). Robot-assisted 3D-TRUS guided prostate brachytherapy: System integration and validation. Medical Physics, 31(3), 539–548.
Badaan, S., Petrisor, D., Kim, C., Mozer, P., Mazilu, D., Gruionu, L., Patriciu, A., Cleary, K., & Stoianoviciand, D. (2011). Does needle rotation improve lesion targeting? International Journal of Medical Robotics and Computer Assisted Surgery, 7(2), 138–147.
Brenner, D., & Hall, E. (2007). Computed tomography—An increasing source of radiation exposure. New England Journal of Medicine, 357(20), 2277–2284.
Abolhassani, N., Patel, R., & Ayazi, F. (2007). Effects of different insertion methods on reducing needle deflection. In: International Conference of the IEEE engineering in medicine and biology society, pp. 491–494. Lyon, France.
Glozman, D., & Shoham, M. (2007). Image-guided robotic flexible needle steering. IEEE Transactions on Robotics, 23(3), 459–467.
Webster, R. J., Kim, J., Cowan, N., Chirikjian, G., & Okamura, A. (2006). Nonholonomic modeling of needle steering. The International Journal of Robotics Research, 25(5–6), 509–525.
Zhao, Y., Zhang, Y., & Shao, J. (2010). Kinematic modeling and experimental study of flexible needle. Robot, 32(5), 666–673.
Zhao, Y., Zhang, Y., Chen, H., Zhang, Y., & Yu, Y. (2013). 2D path optimization for flexible needle based on combination of multiform paths. China Mechanical Engineering, 24(1), 6–11.
Du, H., Zhang, Y., & Zhao, Y. (2015). Modeling of bevel-tipped needle inserting into soft tissue and estimation of needle tip trajectory. Chinese Journal of Scientific Instrument, 36(8), 1744–1751.
Glozman, D., & Shoham, M. (2004). Flexible needle steering and optimal trajectory planning for percutaneous therapies. Lecture Notes in Computer Science, 3217, 137–144.
Abolhassani, N., Patel, R., & Moallem, M. (2007). Needle insertion into soft tissue: A survey. Medical Engineering and Physics, 29(4), 413–431.
Zheng, H., Yao, W., Gao, D., & McGill, C. (2011). Projecting beam model for robot-assisted flexible needle insertion. Journal of Tsinghua University (Science and Technology), 51(8), 1078–1083.
Xu, B., Zhou, C., & Ko, S. (2018). Closed-loop planar fuzzy control system for a curvature-controllable steerable bevel-tip needle. International Journal of Control, Automation and Systems, 16(5), 2421–2431.
Khan, M., & Yi, B. (2020). Design and clinical test of a passive ultrasound probe holder mechanism for arterial puncturing. International Journal of Control, Automation and Systems, 18(1), 29–37.
Kim, K., Woo, H., Cho, J., & Suh, J. (2020). Design, modeling, and evaluation of a compact and lightweight needle end-effector with simple force-feedback implementation for robotic CT-guided needle interventions. International Journal of Control, Automation and Systems, 18(1), 85–101.
DiMaio, S., & Salcudean, S. (2002). Needle insertion modelling and simulation. IEEE International Conference on Robotics and Automation, 2, pp. 2098–2105. Washington, DC, USA.
Jiang, S., Liu, X., Bai, S., & Yang, Z. (2010). The potential field-based trajectory planning of needle invasion in soft tissue. Journal of Biomedical Engineering, 27(4), 790–794.
Alterovitz, R., Lim, A., Goldberg, K., Chirikjian, G., & Okamura, A. (2005). Steering flexible needles under Markov motion uncertainty. In: IEEE International Conference on intelligent robots and systems, pp. 1570–1575. Edmonton, AB, Canada.
Abayazid, M., Vrooijink, G., Patil, S., Alterovitz, R., & Misra, S. (2014). Experimental evaluation of ultrasound-guided 3D needle steering in biological tissue. International Journal of Computer Assisted Radiology and Surgery, 9(6), 931–939.
Huo, B., Zhao, X., Han, J., & Xu, W. (2014). A control method for puncture with flexible needle based on reachable decision. Control Theory & Applications, 31(10), 1423–1430.
Chen, S., Wang, F., Lin, Y., Shi, Q., & Wang, Y. (2021). Ultrasound-guided needle insertion robotic system for percutaneous puncture. International Journal of Computer Assisted Radiology and Surgery, 16(3), 475–484.
Huo, B., Zhao, X., Han, J., & Xu, W. (2015). Puncture path planning for bevel-tip flexible needle based on multi-objective particle swarm optimization algorithm. Robot, 37(4), 385–394.
Tan, X., Lee, Y., Chng, C., Lim, K., & Chui, C. (2020). Robot-assisted flexible needle insertion using universal distributional deep reinforcement learning. International Journal of Computer Assisted Radiology and Surgery, 15, 341-349.
Segato, A., Sestini, L., Castellano, A., & Momi, E. (2020). GA3C reinforcement learning for surgical steerable catheter path planning. In: International Conference on robotics and automation, pp. 2429–2435. Paris, France.
Webster, R. J., Memisevic, J., & Okamura, A. (2005). Design considerations for robotic needle steering. In: International Conference on robotics and automation, pp. 3588–3594. Barcelona, Spain.
Duindam, V., Alterovitz, R., Sastry, S., & Goldberg, K. (2008). Screw-based motion planning for bevel-tip flexible needles in 3D environments with obstacles. In: International Conference on robotics and automation, pp. 2483–2488. Pasadena, CA, USA.
Huo, B., Zhao, X., Han, J., & Xu, W. (2018). Closed-loop control of bevel-tip needles based on path planning. Robotica, 36(12), 1857–1873.
Wang, J., Li, X., Zheng, J., & Sun, D. (2014). Dynamic path planning for inserting a steerable needle into a soft tissue. IEEE/ASME Transactions on Mechatronics, 19(2), 549–558.
Zhang, L., Pang, Y., Su, Y., & Liang, Y. (2008). HPSO-based fuzzy neural network control for AUV. Journal of Control Theory and Applications, 6, 322–326.
Germin Nisha, M., & Pillai, G. (2013). Nonlinear model predictive control with relevance vector regression and particle swarm optimization. Journal of Control Theory and Applications, 11, 563–569.
Li, Y., Zhang, X., Chen, Y., & Zhou, H. (2012). Particle swarm optimization for time-optimal control design. Journal of Control Theory and Applications, 10, 365–370.
Chen, X., Tianfield, H., & Du, W. (2021). Bee-foraging learning particle swarm optimization. Applied Soft Computing, 102, 107134.
Rajasekhar, A., Lynn, N., Das, S., & Suganthan, P. (2017). Computing with the collective intelligence of honey bees—A survey. Swarm and Evolutionary Computation, 32, 25–48.
Gao, W., Huang, L., Liu, S., & Dai, C. (2015). Artificial bee colony algorithm based on information learning. IEEE Transactions on Cybernetics, 45(12), 2827–2839.
Chen, X., Tianfield, H., & Li, K. (2019). Self-adaptive differential artificial bee colony algorithm for global optimization problems. Swarm and Evolutionary Computation, 45, 70–91.
Reed, K., Majewicz, A., Kallem, V., Alterovitz, R., Goldberg, K., Cowan, N., & Okamura, A. (2011). Robot-assisted needle steering. IEEE Robotics and Automation Magazine, 18(4), 35–46.
Aghdam, A., & Liu, P. (2020). A novel path planner for steerable bevel-tip needles to reach multiple targets with obstacles. IEEE Transactions on Instrumentation and Measurement, 69(10), 7636–7645.
Cai, C., Sun, C., Han, Y., & Zhang, Q. (2021). Clinical flexible needle puncture path planning based on particle swarm optimization. Computer Methods and Programs in Biomedicine, 193, 105511.
Tan, Z., Liang, H. G., Zhang, D., & Wang, Q. G. (2022). Path planning of surgical needle: A new adaptive intelligent particle swarm optimization method. Transactions of the Institute of Measurement and Control, 44(4), 766–774.
Author information
Authors and Affiliations
Corresponding author
Additional information
This work was supported in part by the National Key R &D Funding (No. 2018YFE0206900).
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Tan, Z., Zhang, D., Liang, Hg. et al. A new path planning method for bevel-tip flexible needle insertion in 3D space with multiple targets and obstacles. Control Theory Technol. 20, 525–535 (2022). https://doi.org/10.1007/s11768-022-00113-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s11768-022-00113-y