摘要
针对一管多机系统中水力耦合下多机协同控制不足的问题, 本文提出一种基于协同控制理论的多机协同镇定控制策略, 用于建立多机联系. 首先, 重新考虑共用管道的动态水头耦合变化项, 构建包含多台机组状态变量的宏变量, 以多机主要状态变量的输出偏差为控制核心来预设平衡点. 然后, 将宏变量代入控制流形, 推导出新形式的耦合水头项, 将原有线性模型转化为非线性模型来跟踪机组变化. 通过与原形式输出状态对比验证了所提策略在降低机组输出振荡、增强系统孤网运行稳定方面表现优异, 为水力耦合的处理提供了可行的解决方案.
Abstract
Aiming at the problem of insufficient multi-unit synergetic control under hydraulic coupling in the single penstock multi-machine system, this paper proposes a multi-unit synergetic calming control strategy based on synergetic control theory for establishing multi-unit linkage. First, the dynamic head-coupling change term of the shared pipeline is reconsidered, and the macro-variables containing the state variables of multiple units are constructed. The equilibrium point is preset by taking the output deviation of the main state variables of multi-unit as the control core. Then, the macrovariables are substituted into the control manifold to derive a new form of coupled head term, which transforms the original linear model into a nonlinear model to track the unit changes. By comparing the state outputs in the original form, it is verified that the proposed strategy performs well in reducing the output oscillations of the unit and enhancing the stability of the system’s isolated network operation, which provides a feasible solution for the treatment of hydraulic coupling.
1 引言
随着新能源研究的深入,并网能源类型增多且容量增大 [1-2] . 大规模可再生能源入网会增加电力系统的运行负担,对电网造成冲击. 相比其他能源而言,水能的可调性较高,在多能互补电力系统中扮演着重要角色 [3-4] . 因此,加强水电机组调节和运行稳定性控制对整个电网的安全有重要作用和意义.
目前水电机组的控制主要集中在调速器上,包括模型和方法 [5-7] . 其中模型的改进体现在对基础模型的精细化和利用其他方式重新推导和描述上 [8-9] . 而方法则是利用一些新兴控制理论和方法来提升系统的输出稳定性 [10-11] . 但此类研究多数是针对单个机组的控制,较少考虑机组以外的其他因素的影响. 而大容量的抽水蓄能电站通常采用一管多机的布置形式,即多台机组共用同一引水管道. 这种布置方式使得机组在运行过程中更易受其他机组等外在因素的影响,这在一定程度上增大了控制难度 [12-14] .式,即多台机组共用同一引水管道. 这种布置方式使得机组在运行过程中更易受其他机组等外在因素的影响,这在一定程度上增大了控制难度 [12-14] .
多机之间水力耦合及其时滞造成的控制操作不同步问题是一管多机系统控制需要关注的重点. 对一管多机系统的结构分析发现,系统的水力动态对水轮机调节有着较大的影响. 由于共用管道的存在,一台机组调节会引起水力耦合,进而影响其他机组的运行. 水轮机调速器的控制过程若忽略水力耦合作用可能会造成持续性的调节误差,影响水电站的稳定性,对电网形成冲击,导致振荡 [15],即经常提到的“耦合互扰问题”. 因此,在一管多机系统中对共用管中产生的水力耦合进行有效和合理化处理是研究的重点和难点.
目前已有研究揭示水力耦合的存在会加剧系统的不稳定性 [16] . Rezghi等人 [17] 分析了水力耦合的影响,并提出了考虑修正的Suter变换和PID控制策略的方法. 实现了调速器的有效控制,改善了整个系统的瞬态状态稳定性. Mahmoud等 [18] 设计了一种模糊控制器,能够在非线性过程中同时控制一管多机系统中的多个机组,补偿水力耦合造成的偏差误差,体现出快速响应的优点,具有相当稳定的性能. 但该控制器结果实现是通过取代每个机组上的PID控制器,研究重点在控制器的设计上. 上述研究内容均涉及一管多机系统,但对水力耦合未有明确的分析和探索,并且忽略了各机组的状态变量之间的相互影响和制约. 因此,对一管多机系统进行系统整体考虑,将所有相关因素集成在一起来实现机组统一控制很有必要.
传统PID控制具有简洁快速的控制优势,其在各发电厂被广泛应用,本文保留了原有单个机组的PID控制方式,将重点放在共用管道耦合处. 首先,对一管多机系统的特征进行分析,对水力耦合的影响进行梳理. 引入协同控制理论对水力耦合项进行重新推导,充分考虑多机之间的联系,建立了包含多个机组状态变量的协同控制器. 该方法将机组主要的状态变量的输出偏差作为控制核心,通过构建预设平衡点的附加协同控制来实现系统的镇定控制,真正意义上实现了多机联合协同控制.
2 一管多机水电机组模型
水电机组一管多机布置形式如图1所示,其中,H-G1表示第1台水电机组,H-Gn表示第n台水电机组. 由于共用管道的存在,一台机组调速器工作时会引起管道水压变化,进而影响其他机组转速并引发调速器动作. 而多台机组共同调节时,机组之间的相互影响作用会更为明显. 这些现象都是由共用管道中的水力耦合造成的,如图1中的A点所示.

图1一管多机水电系统的结构示意图
Fig.1Structural diagram of a single penstock multi-machine hydropower system
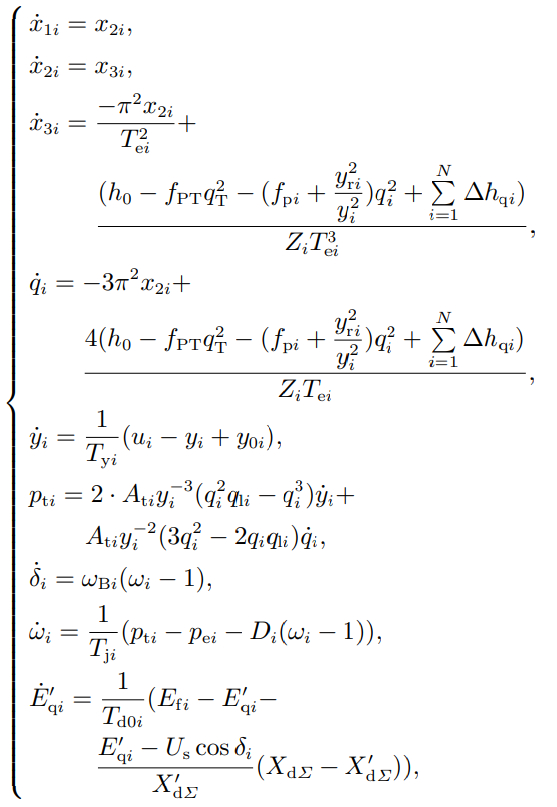
根据文献 [19],弹性水击下一管多机系统水电机组的多阶微分方程可写为如下形式:
(1)
其中: x1i,x2i和x3i为支管的水力计算得到的状态变量; qi为支管流量; 为流量变化引起的共用管道动态水头变化,也是1 ∼ N个支管的动态水头变化总和; yi为主接力器位移; pti为机械功率; pei为发电机有功功率; δi为发电机功角; ωi为发电机角速度; 为发电机q轴瞬态电动势. 式中,下标i表示第i台机组,i = 1,· · ·,N. 相关变量为标幺值形式,其他变量说明见表1.
从上式可以看出,单个机组的输出受共用管道的相关状态量的影响,如fPT,qT和
表1相关参数说明
Table1Description of relevant parameters

3 控制对象分析
流量变化引起的瞬态水头变化是共用管道产生水击振荡的主要原因,换句话说,受各机组流量等相关因素的影响. 因此,本研究将重点放在该项上.
根据以往研究可知,支管水头变化的总和可以反映共用管道内的水头变化情况,共用管的动态水头变化情况可通过式(2)获得 [20],即
(2)
其中: ZT为共用管的水击阻抗,TeT为共用管的弹性时间常数.
从上式可以看出,各支管的动态水头被表示为含有流量的传递函数形式,管道中的水力动力学被视为一个线性系统. 式(2)是各管道线性系统的叠加形式,揭示了水力耦合形成的原理. 然而,这种线性形式是偏理想化的处理方式,与原有水电机组非线性模型匹配度不高. 此外,水力耦合不仅是由机组流量引起的,而是多台机组的多个状态变量共同作用下的结果. 因此,要有效抑制共用管道水力耦合对各机组运行的影响,要全面考虑相关因素.
本文对共用管道的水力耦合项进行重新考虑,既为将原有线性推导形式转化为与现有系统更匹配的非线性形式,又可多方面考虑对该项产生影响的各类因素. 将多台机组的多个状态变化量整合在一起,推导出新的耦合项形式来代替原有的
4 多机协同控制策略
协同控制理论是一种有效的非线性设计方法,可将研究对象的多个子系统部分联合起来,通过对象间的相互作用和协同合作来实现功能要求.
4.1 协同控制理论
协同控制理论的核心是构建一个由系统状态变量组成的控制流形,受控系统将沿着该流形收敛直到系统达到平衡状态. 基本原理描述如下.
选取受控非线性系统为
(3)
其中: x为系统状态变量,u为控制变量,t为时间.
宏变量是包含状态变量的函数,通常可选取为状态变量的线性组合,目的是让系统在一定时间内收敛到控制流形ψ = 0上.
定义宏变量收敛动态过程为
(4)
其中T为时间设计参数. 理论上T越小,系统动态响应速度越快. 任何函数只要满足微分方程(4),那么其中的ψ(t)必然为指数函数形式.
4.2 控制器设计
参考宏变量选取的一般形式,本节选取机组状态变量pt,y,δ 和ω 的线性组合获取宏变量的初始形态. 考虑到多机的相互影响,将组成宏变量的状态变量扩展为,表达式如下所示:
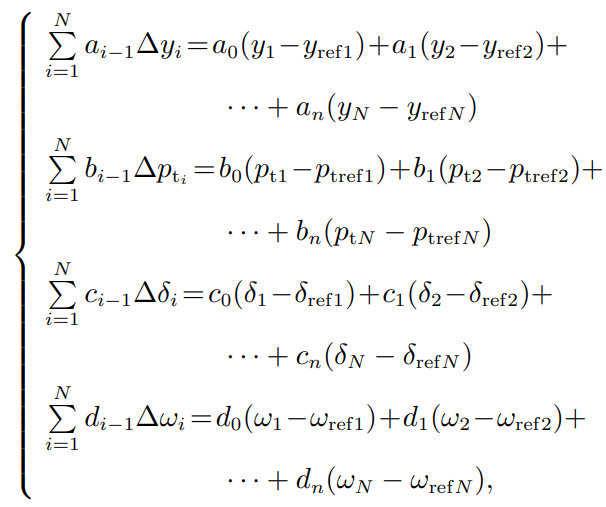
(5)
其中:和分别代表第i 台机组的导叶开度、机械功率、功角和角速度对应的参考值. a0,· · ·,an,b0,· · ·,bn,c0,· · ·,cn和d0,· · ·,dn分别表示不同机组4者变化值的权重系数. 为简化参数,取a0 = b0 = c0 = d0 = 1.
根据上述分析,宏变量可表示为
(6)
其中: k1,k2和k3分别为多机机械功率变化量、功角变化量和角速度变化量的协同控制参数.
式(6)求导可得
(7)
其中:
将式(6)–(7)代入收敛方程式(4)中,可得
(8)
从式(8)可解得
(9)
其中:
新得到的耦合水击项的特点主要体现在以下几点:
1)是引入协同理论对进行重新推导得到,与的物理概念上是一致的;
2)从形式上看,新推导出的耦合水击项利用了机组状态变量的输出偏差来设计协同控制律,建了预设平衡点(参考值),并利用协同理论控制流形的衰减特性确保系统的稳定性;
3)式(9)得到的协同控制律表达式中包含了多台机组的多个状态量的变化,这本质上是一种广义的状态反馈控制;
4)该方法将原有的线性处理形式转化为非线性形式,更符合非线性系统的应用情况. 理论过程的图形化如图2所示.
4.3 控制器稳定性分析
为了检验选取的宏变量设计的控制器的稳定性,本文采用李雅普诺夫理论对其进行简单的分析和证明.
定理 1 若存在Lyapunov函数V (x)满足:
1)正定性: V(x)≥ 0,且V(x)= 0 ↔ x = 0;
2)负半定导数: 沿系统轨迹满足
3)径向无界性:则系统在平衡点x = 0处是全局渐近稳定的.
证选取Lyapunov函数为
(10)
对上式求导,并将式(5)(8)代入可得
(11)
根据式(11)可知,在T >0的情况下这表明宏变量ψ满足稳定性条件. 因此,在控制器式(9)的控制作用下,宏变量ψ能在一定时间内到达流形 ψ = 0,并实现稳定运行.
5 仿真
在MATLAB软件中对图2所示的电力系统进行了仿真试验以验证其有效性. 为仿真方便,本文采用了一管双机的系统进行功率扰动和三相短路故障研究,系统的基本参数如表2示.

图2一管多机系统协同控制原理示意图
Fig.2Schematic diagram of the principle of coordinated control of single penstock multi-machine system
表2相关参数
Table2Relevant parameters

5.1 功率扰动
负荷扰动对调节系统稳定性有重要影响,可有效检验控制器的控制效果. 仿真对比对象为原有系统,定义为PID,所提的协同–PID方法定义为XT-PID.
工况设置: 系统中的两台水电机组的初始功率均为0.8. t = 1 s时,机组2的功率保持不变,机组1的功率由0.8调至0.5; t = 30 s时,机组1的功率又由调至 0.9. 该过程中系统相关状态量的输入信号及两台机组的输出仿真结果如图3和4所示.
从图4可以看出,发生功率调节的瞬间,协同控制器对机组1的作用未体现明显的控制优势,但很大程度上抑制了机组2的输出振荡,缩短调节时间.
为了更直观展示出两种形式在处理水力耦合的作用,图5给出了两台水轮机的水头输出及共用管道动态水头变化情况.
从图5可以看出,功率调节幅度越大,两台水轮机水头输出及共用管道动态水头变化值的波动幅度越大. 协同控制器参与的系统的水头输出变化较小,振荡幅度约为原系统的1/6. 达到平衡状态后,输出变化值为0. 这表明所提方法对功率调节造成的水头振荡有很好的抑制作用.

图3状态变量输入信号
Fig.3State variable input signal

图4功率调节下两台机组的响应情况
Fig.4Response of two units under power regulation

图5两台机组水头输出及耦合水头变化输出
Fig.5Head output and coupled head variation output of two units
接着,本节还研究了所提方法下两台机组的机端电压变化值随有功功率、角速度变化值的变化轨迹,如图6所示.
从图6可以看出,两台机组的起点均是从[0 0 0] 处开始,最终又回到起点. 由于功率调节,机组1产生了瞬时功率差值,而后随着角速度和功率变化达到新的平衡状态. 机组2的变化较为复杂,随机组1的调节变化. 机组1未调节时,各状态变量变化较小. 调节后,由于管道耦合作用,轨迹表现出明显的螺旋震荡现象(蓝色区域),表明机组2的角速度和电压受到较大扰动,并在经历一段时间的振荡调整后缓慢收敛,轨迹逐步向[0 0 0]靠近. t = 30 s时,机组1的功率突变再次引起系统扰动,机组2受到影响再次出现新的螺旋震荡,有较长振荡过程. 与机组1相比,其运行轨迹波动频繁的原因是其功率和频率随着机组1的调节出现持续振荡,机组间的动力学相互作用导致传递过程更为复杂.
5.2 三相短路故障
为了进一步验证该协同控制器的作用,本节对系统发生三相短路故障时两种控制形式的控制效果进行了对比研究,结果如图7所示.
图7表明,协同控制器的参与能减小调节后期系统的振荡幅度. 但XT-PID下的导叶开度需要约为25 s达到平衡状态,而PID控制只需约12 s. 这种导叶开度控制差距产生的原因可能是XT-PID协同了两台机组,会同时对两台机组的导叶开度进行控制,进而影响各机组流量. 水轮机机械功率输出受导叶开度和流量的影响,两者按照一定的比例增大或减小可以保证机组的输出功率不变.

图6机组1和机组2的机端电压变化值随有功功率、角速度变化值的轨迹图
Fig.6Trajectory of terminal voltage changes with active power and angular velocity for units 1 and 2

图7三相短路故障下两种控制形式对比图
Fig.7Comparison of two control forms under three phase short circuit fault
6 参数的影响分析
6.1 系统参数的影响
图8给出了支管1的长度变化对XT-PID控制下两台机组功率输出的影响.

图8支管1的长度对XT-PID控制效果的影响
Fig.8Influence of the length of branch pipe1 on the XTPID control effect
图8表明,机组1发生调节时,支管1长度变化对机组1的输出功率无明显影响,变化程度极小.
对机组2而言,支管1较长时机组2的振荡幅度较大,而支管1较短时振荡幅度会减小. 这表明支管1的长度与机组2的振荡幅度成正比.
6.2 协同参数的影响
6.2.1 时间参数
根据第4.1节的理论可以看出,时间参数T的取值对系统的调节时间有一定的影响. 因此,在本节对时间T的取值影响进行了分析,如图9所示.

图9不同时间参数T下控制器的宏变量输出
Fig.9Macro-variable output of controller under different time parameters T
图9中宏变量输出会在系统发生功率变化的瞬间增大或减小,这是由机械功率参考值发生瞬变引起的. 系统达到稳定状态后,其输出值恒为0. 随着T的增大,宏变量衰减速度越慢,达到0值的时间越长. 但T值较小时,系统振荡会较为明显.
6.2.2 协同系数
本节重点研究协同系数变化对机组2的影响. 仿真发现,k3的变化对控制效果的影响较小,在该部分忽略其研究. 重点对k1和k2变化对系统输出超调量的影响进行了分析研究.
图10–11表明,随着k1的减小,状态变量输出情况会发生改变. 有功和频率的超调量由正值变为负值,而无功和电压的则相反. 状态变量超调值呈先减小后增大的趋势. 且k2对系统输出的影响与k1相反. 当k2 不变时,在1∼2之间存在一个可以使输出振荡最小的 k1值. 同样,在0.1∼1之间存在一个k2值使得输出最小. 有功和角速度随着参数变化的趋势一致,而无功和电压的趋势一致. 这一现象与理论相符.

图10不同参数k1下机组2的有功功率,无功功率,角速度和机端电压输出
Fig.10Active power, reactive power, angular velocity, and terminal voltage output of unit 2 under different parameters k1

图11不同k2下机组2输出的最大偏差
Fig.11Maximum deviation of unit 2 output under different k2
6.2.3 权重系数
此外,本文对权重系数a,b,c和d的取值对状态变量变化的影响进行了分析,如图12所示. 在图中,用表示,
图12表明,随着 a1,b1,c1 和d1 的增大,和的变化波动越小,这也表明系统的输出超调量越小. 因此,a1,b1,c1和d1取值越大对系统的振荡抑制作用越明显. 由于机组1发生了调节而机组2未变,因此变量的变化情况在机组1上呈近似对称的形状,机组2随着机组1的变化而变化.
7 孤网情况研究
另外,本节给出了一管两机系统孤网运行时系统的输出情况. 工况设置: 两台水电机组初始功率均为 0.6,负荷为1.2,在t = 1 s时,负荷升为1.4,水电机组1 的功率由0.6调节为0.8; t = 30 s时,负荷继续升至1.6,此时对水电机组2进行调节,由0.6调节为0.8; t = 60 s时,负荷将为1.2,机组1和2均由0.8调节为0.6. 则多机孤网的输出情况如图13所示. 图中的虚线代表原系统输出,实线代表的是所提方法下的系统输出. PZ为系统联合有功功率, QZ为联合无功功率,BUSf为母线频率,Us为母线电压.

图12不同a1,b1,c1和d1下两台机组状态变量变化值对和的影响
Fig.12The influence of changes in state variables of two units under different a1, b1, c1, and d1 onand
从图13可以看出,协同控制器能很好地减小系统的联合输出波动,大大缩短系统达到平衡状态的时间. 但对母线电压振荡的作用较小.

图13系统的联合输出
Fig.13Joint output of the system
8 结论
本文分析了一管多机系统的水力耦合影响,为了实现多台机组的整体联合控制,引入了协同控制理论,建立了多机状态变量协同控制器,对水力耦合影响的水头变化项进行了重新推导. 仿真结果表明,该控制形式的设计有以下几个特征:
1)设计的协同控制器充分考虑了多台机组的状态变化值,能将系统变化及调节目标及时反馈给控制器以加以控制,最终实现快速稳定控制. 因此,本文提出的方法可应用于其他需要状态反馈的系统,例如: 柴油发电机组和汽轮机等系统.
2)本文以协同控制理论为基础提出耦合处水头变化项新推导方法在孤网运行时能根据系统需求达到调节状态的新平衡. 它能保证系统实现振荡幅度减小,调节过程平缓且调节时间缩短的控制目的.